« SE3Trinome2022-2 » : différence entre les versions
Aller à la navigation
Aller à la recherche
Aucun résumé des modifications |
|||
| Ligne 53 : | Ligne 53 : | ||
</gallery> | </gallery> | ||
File:Pcb_binome2.zip|Projet Kicad | === • PCB === | ||
[[File:Pcb_face1.png|Projet Kicad]] | |||
[[File:Pcb_binome2.zip|Projet Kicad]] | |||
Version du 2 mai 2023 à 12:58
GIT
Voici le lien vers notre GIT : https://archives.plil.fr/ccariat/SE3Trinome2022-2_Projet_2km.git
Projections :
- Dimension : voiture 1:43 dans la mesure du possible l'électronique sera caché sous la carrosserie
- Contrôle de la voiture : déplacement programmé (Bluetooth si le temps nous le permet)
- Énergie : batterie LiPo accrochée sur le toit, il n'y aura qu'un port micro USB pour l'information et le rechargement de la batterie intégrée à la voiture
- Éclairage : deux phares avant via deux LED RGB qui pourrons servir d'IHM
- Direction : sauf en cas de manque de place les roues avant seront orientables, dans l'autre cas nous prendrons une roue folle
Liste matériel :
- voiture 1:43
- Atmega 16u2
- Mini-moteur continu avec réducteur + pilote DRV8210DRLR
- Moteur pas à pas glissière
- Connecteur USB_A
- 2 Leds RGB
- Batterie LiPo
- Chargeur max1811
- Module de communication Bluetooth
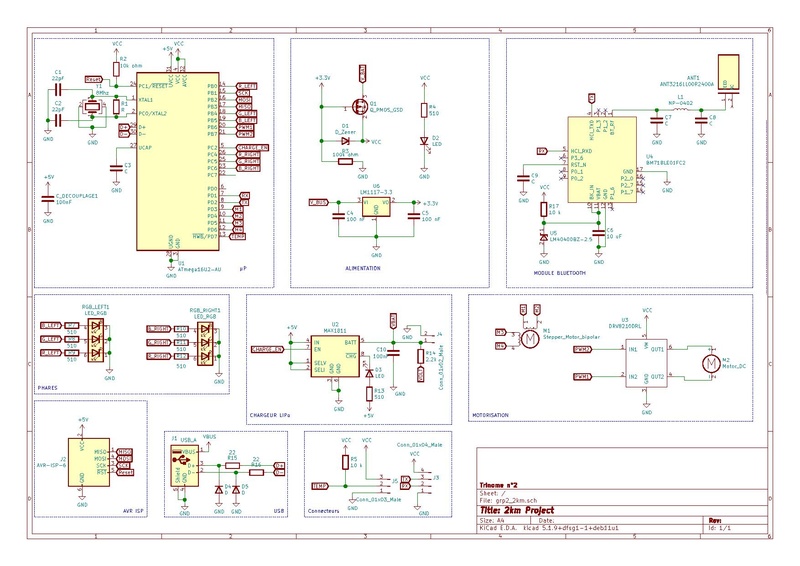
Schématique
Voici le schéma électronique produit pour ce projet :
• Composant crées
Pour mener à bien la conception assisté par ordinateur nous avons dû créer des composant directement via Kicad.

Module Bluetooth
Antenne du module Bluetooth

Driver du moteur DC



• Empreintes crées
Afin de se rendre compte de la place que prend chaque composant il a fallut trouver ou créer des empreintes pour chaque élement du montage.
Voici celles que nous avons construite :
Module Bluetooth

Antenne du module Bluetooth
Moteur DC



