« SE3Groupe2024-2 » : différence entre les versions
| Ligne 200 : | Ligne 200 : | ||
<p style="clear: both;" /> | <p style="clear: both;" /> | ||
=== | === Vue 3D === | ||
[[Fichier:SE3_2024_G2_prog_PCB1.png|left|thumb|MODELE 3D : Face ARRIERE originale, carte V0]] | [[Fichier:SE3_2024_G2_prog_PCB1.png|left|thumb|MODELE 3D : Face ARRIERE originale, carte V0]] | ||
[[Fichier:SE3_2024_G2_prog_PCB2.png|right|thumb|MODELE 3D : Face AVANT originale, carte V0]] | [[Fichier:SE3_2024_G2_prog_PCB2.png|right|thumb|MODELE 3D : Face AVANT originale, carte V0]] | ||
<p style="clear: both;" /> | <p style="clear: both;" /> | ||
=== | === Fichier kicad === | ||
[[Fichier:2024-PSE-G2-Prog.zip]] | [[Fichier:2024-PSE-G2-Prog.zip]] | ||
<p style="clear: both;" />AVR Hardware : | <p style="clear: both;" />AVR Hardware : | ||
Version du 25 mars 2025 à 13:51
Description
Objectif
L'objectif de ce projet est de concevoir une station domotique capable de collecter et d'afficher des mesures provenant de capteurs environnementaux. Elle devra également être capable d'activer des actionneurs, tels que des LEDs, des cadenas ou tout autre dispositif, en fonction des besoins.
Cahier des charges
La station domotique devra permettre l'affichage des informations suivantes concernant une pièce :
- Température ambiante ;
- Taux d'humidité ;
- Présence humaine (via capteur de mouvement) ;
- D'autres paramètres pourront être ajoutés en fonction de l'avancement du projet.
Elle devra aussi permettre de contrôler différents actionneurs dans la pièce, tels que :
- L'éclairage, en fonction de la présence d'une personne (via un capteur de mouvement) ;
- D'autres dispositifs pourront être intégrés en fonction des besoins.
Des capteurs et actionneurs supplémentaires pourront être ajoutés si le projet atteint ses objectifs initiaux.
Spécification techniques
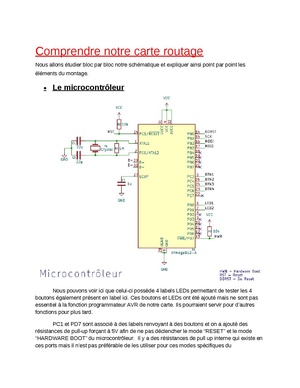
Microcontrôleur
Le projet nécessite un microcontrôleur, qui contiendra le programme, et qui communiquera avec les autres composants via les GPIOs.
Nous avons le choix entre plusieurs modèles de microcontrôleur : ATmega16u4, AT90USB1286, AT90USB1287.
Voici un tableau comparatif afin de sélectionner le plus adapté pour notre usage :
| Caractéristiques | ATmega16U4 | AT90USB1286 | AT90USB1287 |
| Architecture | AVR 8 bits | AVR 8 bits | AVR 8 bits |
| Mémoire Flash | 16 KB | 128 KB | 128 KB |
| RAM (SRAM) | 1.25 KB | 4 KB | 4 KB |
| EEPROM | 512 Bytes | 4 KB | 4 KB |
| Fréquence d'horloge max. | 16 MHz | 16 MHz | 16 MHz |
| Nombre de broches GPIO | 26 | 48 | 48 |
| Interfaces de communication | UART, SPI, I²C, USB 2.0 | UART, SPI, I²C, USB 2.0 | UART, SPI, I²C, USB 2.0 |
| Contrôleur USB intégré | Oui (USB 2.0) | Oui (USB 2.0) | Oui (USB 2.0) |
| Taille des registres | 8 bits | 8 bits | 8 bits |
| Nombre de broches | 32 | 64 | 64 |
| Différences principales | Conçu pour des applications compactes avec
moins de mémoire et d'E/S |
Plus de mémoire, adapté à des projets complexes nécessitant de nombreuses E/S et de la mémoire | Similaire au AT90USB1286 mais avec des fonctionnalités spécifiques
pour certaines configurations USB (e.g., modes host/OTG). |
| Lien documentation | https://www.microchip.com/en-us/product/atmega16u4 | https://www.microchip.com/en-us/product/at90usb1286 | https://www.microchip.com/en-us/product/at90usb1287 |
Avec ce tableau, on constate que l'ATmega16U4 ne possède pas suffisamment de broches GPIOs. Cependant l'AT90USB1286 et son homologue l'AT90USB1287 dépassent notre cadre d'usage (utilisation mode USB spécifique HOST/OTG, etc... ).
Le compromis est donc d'opter pour un ATmega32u4 afin d'avoir suffisamment de broches et de mémoire.
| Caractéristiques | ATmega32U4 |
|---|---|
| Architecture | AVR 8 bits |
| Mémoire Flash | 32 KB |
| RAM (SRAM) | 2.5 KB |
| EEPROM | 1 KB |
| Fréquence d'horloge max. | 16 MHz |
| Nombre de broches GPIO | 26 |
| Interfaces de communication | UART, SPI, I²C, USB 2.0 |
| Contrôleur USB intégré | Oui (USB 2.0) |
| Taille des registres | 8 bits |
| Nombre de broches | 32 |
| Différences principales | Conçu pour des applications nécessitant un contrôleur USB intégré, avec une mémoire et un nombre de broches intermédiaires |
Datasheet ATmega32u4 :

Communication
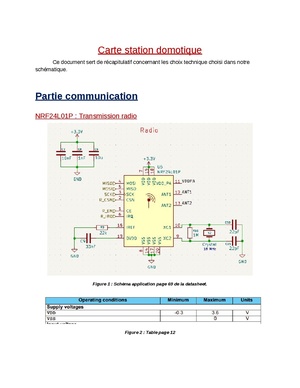
La station utilisera des puces NRF24L01 pour la communication sans fil entre les différents composants.
Lien tutoriel utilisation de puces à distance : NRF24L01
Datasheet NRF24L01 :

Énergie
La station sera alimentée de manière hybride, selon les scénarios suivants :
- Par un port USB, pour la programmation, les tests et la configuration avec affichage sur moniteur PC ;
- Par une batterie Lithium, en mode autonome pour une utilisation prolongée (avec affichage écran LCD dans un second temps).
Les capteurs/actionneurs seront alimentées de manière hybride, selon les scénarios suivants :
- Par un port USB, pour la programmation, les tests et la configuration ;
- Par une batterie Lithium, en mode autonome pour son usage définitif.
Modèles de batterie à notre disposition :
- Batterie 3.7V 100 mAh, connecteur molex mâle ;
- Batterie 3.7V 300 mAh, connecteur molex mâle ;
Datasheet du chargeur et du régulateur :


Affichage
Dans un premier temps, les informations seront remontées via la connexion USB à un programme sur PC (selon les exigences du cahier des charges).
Dans un second temps, un écran LCD sera utilisé pour afficher les données directement sur la station, offrant ainsi une solution autonome, sous réserve du temps disponible pour cette implémentation.

Diverses La carte comportera également une led afin d'indiquer son état d'alimentation.
Lien GIT
https://gitea.plil.fr/ahouduss/se3_2024_B2.git
Programmateur AVR
Schématique
Notre schéma électrique
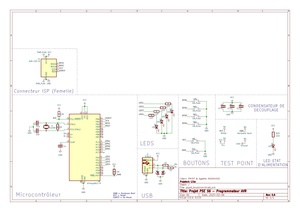
Comprendre notre schéma
Datasheet ATmega8u2 :

Vue 3D


Fichier kicad
AVR Hardware :

Station
Schématique
Notre schéma électrique

Comprendre notre schéma
Routage
Brasure