« SE3Groupe2024-3 » : différence entre les versions
Aucun résumé des modifications |
|||
| (54 versions intermédiaires par 2 utilisateurs non affichées) | |||
| Ligne 1 : | Ligne 1 : | ||
== Programmateur AVR == | |||
=== Description du projet === | |||
Pour notre module de Premier Système Embarqué (PSE), il nous a été demandé de concevoir un PCB et programmer un microcontrôleur permettant de programmer un autre microcontrôleur (qui sera testé sur une Arduino Uno). | |||
'''<u>Etape 1 : Conception du circuit électronique</u>''' | |||
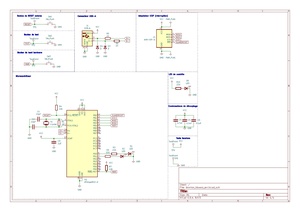
La première étape fut de mettre en place le circuit électronique via KiCad, cette carte est composée de : | |||
* 1 Atmega8U2-A qui est notre microcontrôleur | |||
* 1 quartz 8 Mhz | |||
* 1 LED de contrôle présence tension | |||
* 2 LED de test | |||
* 1 port USB-A pour la communication avec l'ordinateur | |||
* 1 connecteur ISP 2x3 pour la connection avec l'AVR à programmer | |||
* 1 bouton de BOOT | |||
* 1 bouton de RESET | |||
* 1 bouton de test | |||
Nous avons conçu le schéma suivant pour notre carte selon les indications données. Il a fallu environ entre 2 et 3 séances de deux heures pour la concevoir. | |||
[[Fichier:Schéma du programmateur.png|néant|vignette|<i>Schéma du programmateur AVR du binôme 3</i>]] | |||
'''<u>Etape 2 : Routage de la carte</u>''' | |||
Après avoir fait le schéma, nous avons fait une première version du routage de la carte qui fut modifié par souci d'optimisation (pour avoir notamment les composants sur une seule couche) par M.Boé, et nous avons obtenu ce routage suivant qui a été tiré en plusieurs fois. | |||
[[Fichier:Schéma prototype.png|vignette|240x240px|<i>Routage du programmateur AVR du binôme 3, version 1</i>|gauche]] | |||
[[Fichier:Routage v1.png|right|vignette|207x207px|<i>Routage du programmateur AVR du binôme 3, version modifié</i>]] | |||
'''<u>Etape 3.0 : Fonctions pratiques</u>''' | |||
Nous avons conçu 3 fonctions primaires, permettant de nous simplifier la gestion des Entrées/Sorties. | |||
Nous avons la fonction ''setup_io'', qui permet, pour un pin et un port donné, de décider de l'assigner à une entrée ou une sortie, et d'activer ou non la résistance de PULL UP interne. | |||
De plus, pour simplifier et éviter la répétition de code, le port utilisé est temporairement remplacé par un pointeur ayant l'adresse du port utilisé. | |||
void setup_io(int pin, int is_output, int pull_up_active, char port){ | |||
volatile uint8_t* PORTx; | |||
volatile uint8_t* PINx; | |||
volatile uint8_t* DDRx; | |||
if (port == 'b'){ | |||
PORTx = &PORTB; | |||
PINx = &PINB; | |||
DDRx = &DDRB; | |||
} | |||
if (port == 'c'){ | |||
PORTx = &PORTC; | |||
PINx = &PINC; | |||
DDRx = &DDRC; | |||
} | |||
if (port == 'd'){ | |||
PORTx = &PORTD; | |||
PINx = &PIND; | |||
DDRx = &DDRD; | |||
} | |||
if (is_output){ | |||
(*DDRx) |= 1<<pin;//met la led D1 en output | |||
}else{ | |||
(*DDRx) |= 0<<pin;//met la led D1 en input | |||
if (pull_up_active){ | |||
(*PORTx) |= 1<<pin; | |||
}else{ | |||
(*PORTx) &= ~(1<<pin); | |||
} | |||
} | |||
} | |||
Nous avons la fonction ''active_o'', qui permet, pour un pin et un port donné, de le mettre à 1 ou à 0. La même méthode est utilisé pour la gestion de port via un pointeur. | |||
Remarque : Cette fonction est destinée à agir sur des pins qui ont été paramétrés en sortie au préalable. | |||
void active_o(int pin, int is_active, char port ){ | |||
volatile uint8_t* PORTx; | |||
volatile uint8_t* PINx; | |||
volatile uint8_t* DDRx; | |||
if (port == 'b'){ | |||
PORTx = &PORTB; | |||
PINx = &PINB; | |||
DDRx = &DDRB; | |||
} | |||
if (port == 'c'){ | |||
PORTx = &PORTC; | |||
PINx = &PINC; | |||
DDRx = &DDRC; | |||
} | |||
if (port == 'd'){ | |||
PORTx = &PORTD; | |||
PINx = &PIND; | |||
DDRx = &DDRD; | |||
} | |||
if (is_active){ | |||
(*PORTx) &= ~(1<<pin); //allume la led | |||
}else{ | |||
(*PORTx) |= 1<<pin; | |||
} | |||
} | |||
Nous avons la fonction ''read_i'', qui permet, pour un pin et un port donné, de lire sa valeur. | |||
Remarque : Cette fonction est destinée à lire sur des pins qui ont été paramétrés en entrée au préalable. | |||
int read_i(int pin, char port){ | |||
int val = 0; | |||
if (port == 'b'){ | |||
val = PINB; | |||
}else if (port == 'c'){ | |||
val = PINC; | |||
}else if (port == 'd'){ | |||
val = PIND; | |||
} | |||
int mask = 0; | |||
mask = 1 << pin; | |||
return (val & mask); | |||
} | |||
'''<u>Etape 3.1 : Premier programme, interaction bouton/LED</u>''' | |||
int main (void) { | |||
CLKSEL0 = 0b00010101; // sélection de l'horloge externe | |||
CLKSEL1 = 0b00001111; // minimum de 8Mhz | |||
CLKPR = 0b10000000; // modification du diviseur d'horloge (CLKPCE=1) | |||
CLKPR = 0; // 0 pour pas de diviseur (diviseur de 1) | |||
setup_io(LED_1, 1, 1, 'd'); // Led définie en OUTPUT sur le Port D | |||
setup_io(LED_2, 1, 1, 'd'); // | |||
setup_io(BUTTON, 0, 1, 'b'); // Bouton INPUT sur le Port B avec résistance de PULL UP interne | |||
active_o(LED_2, 0, 'd'); // La LED 2 est éteinte | |||
while(1) { | |||
if( !read_i(BUTTON, 'b') ){ | |||
active_o(LED_1, 0, 'd'); //Si le bouton est activé, on allume la LED, sinon on l'éteint | |||
}else{ | |||
active_o(LED_1, 1, 'd'); | |||
} | |||
_delay_ms(100); | |||
} | |||
} | |||
Ce programme permet basiquement d'allumer la LED lorsque que le bouton est appuyé. Il utilise les fonctions vues précédemment. | |||
====== Vidéo démonstrative ci dessous : ====== | |||
[[Fichier:Video bouton.mov|néant|vignette]] | |||
'''<u>Etape 4 : Deuxième programme, communication série PC/AVR</u>''' | |||
Pour communiquer avec le PC en série, nous avons utilisé la librairie LUFA. | |||
'''Voici les modifications que nous avons apportées :''' | |||
A la fin du ''main'', nous avons paramétrés nos pins et rajouter une variable qui permettra de n'afficher sur la liaison série uniquement les changements d'états. | |||
#define LED_1 0 // Port D | |||
#define LED_2 1 // Port D | |||
#define BUTTON 4 // Port B | |||
int button_toggle = -1; //evite d'imprimer un texte tout le temps | |||
//Initialisation | |||
setup_io(LED_1, 1, 1, 'd'); // Led OUTPUT | |||
setup_io(LED_2, 1, 1, 'd'); // Led | |||
setup_io(BUTTON, 0, 1, 'b'); // Bouton INPUT | |||
Nous avons ensuite modifié la fonction ''CDC_Task'' pour y implémenter la logique souhaitée : | |||
Quand on appuie sur le bouton, le PC recevra "Button pressed\r\n", et quand on le relâche, le PC recevra "Button not pressed\r\n" | |||
void CDC_Task(void) | |||
{ | |||
... //LUFA Code | |||
//Notre code | |||
int is_button_pressed = !read_i(BUTTON, 'b'); | |||
if( button_toggle != 0 && is_button_pressed ){ | |||
active_o(LED_1, 0, 'd'); //Si le bouton est activé, on allume la LED, sinon on l'éteint | |||
ReportString = "Button pressed\r\n"; | |||
button_toggle = 0; | |||
ActionSent = false; | |||
} | |||
if(button_toggle != 1 && !is_button_pressed ){ | |||
active_o(LED_1, 1, 'd'); | |||
button_toggle = 1; | |||
ReportString = "Button not pressed\r\n"; | |||
ActionSent = false; | |||
} | |||
... //LUFA Code | |||
} | |||
'''Vidéo démonstrative ci dessous :''' | |||
[[Fichier:Communication serie.mov|néant|vignette]] | |||
== Description == | == Description == | ||
'''<u>Sujet 1 : Manette sans fil</u>''' | |||
'''<u>Présentation du projet</u>''' | |||
=== Objectif === | === Objectif === | ||
| Ligne 10 : | Ligne 241 : | ||
* Retour visuel via des LED indiquant l’état de la manette (connexion, batterie faible, etc.). | * Retour visuel via des LED indiquant l’état de la manette (connexion, batterie faible, etc.). | ||
* Commandes numériques : plusieurs boutons pour des actions spécifiques (tir, saut, pause, etc.). | * Commandes numériques : plusieurs boutons pour des actions spécifiques (tir, saut, pause, etc.). | ||
* Communication radio entre la manette et le PC | * Communication radio entre la manette et le PC | ||
* Gestion de l’alimentation hybride (filaire/batterie) | * Gestion de l’alimentation hybride (filaire/batterie) | ||
| Ligne 30 : | Ligne 261 : | ||
** les différents modes de jeu. | ** les différents modes de jeu. | ||
'''<u>Etape 1 : Schématique de la manette</u>''' | |||
La première étape à laquelle nous avons procédé pour la conception de notre manette est de faire une étude schématique de celle-ci. Nous devions tout d'abord ajouter les composants nécessaires à notre carte qui sont : | |||
*l'ATmega32u4 pour la programmation | |||
* le module radio NRF24L01 pour la communication | |||
* le module de charge de la batterie | |||
* le régulateur de tension | |||
* le port USB-A | |||
Ce qui nous donne ceci : | |||
[[Fichier:Schématique manette.png|néant|vignette|<i>Schéma des composants de base de la manette sans fil pour le projet PSE (binôme 3)</i>]] | |||
Mis à part les composants nécessaires pour le projet, nous avons réfléchit à des fonctionnalités que nous pourrions rajouter à notre manette. Nous sommes parti au départ sur une manette de jeux vidéos type Playstation pour nous inspirer sur les fonctionnalités. Nous avons donc penser à une manette comportant : | |||
*1 croix directionnelle (4 boutons) | |||
* 4 boutons d'action | |||
* 1 bouton "HOME" | |||
* 2 joysticks et deux gachettes (pas quatre car il n'y avait pas assez de PIN sur le microcontrôlleur) | |||
Cependant au fur et à mesure de notre routage, nous avons commencé à enlever des composants "superficiels" comme les gâchettes et le bouton "HOME" qui nous gênait sur le placement du module radio. | |||
<u>Nous nous sommes convenus sur ces fonctionnalités sur la manette :</u> | |||
[[Fichier:Bouton manette.png|néant|vignette|<i>Schéma des fonctionnalités de la manette sans fil pour le projet PSE (binôme 3)</i>]] | |||
'''<u>Etape 2 : Routage de la manette</u>''' | |||
Lors de notre routage, nous devions gérer plusieurs contraintes : | |||
*la proximité des quartz par rapport au module radio ainsi que du microcontrôlleur | |||
[[Fichier:Quartz microc.png|vignette|''Routage du quartz au niveau du microprocesseur'']] | |||
[[Fichier:Quartz module radio.png|néant|vignette|240x240px|''Routage du quartz au niveau du module radio'']] | |||
*l'absence de terre autour de l'antenne radio | |||
[[Fichier:Antenne terre.png|gauche|vignette|''Routage de l'antenne'']] | |||
Nous avons eu aussi fait une erreur dans le routage qui nous empêchait de faire le reset du code du microcontrôleur que nous avons dû corriger physiquement. | |||
=== Communication Radio : === | |||
Nous avons soudé les composants NRF, on n'a pas eu le temps d'essayer de communiquer directement avec. Cependant, nous avons fait des tests avec 2 modules/antennes "NRF24L01 + PA + LNA". On a notamment utiliser un site qui documente très bien la façon de procéder : <nowiki>https://passionelectronique.fr/tutorial-nrf24l01/</nowiki>. Finalement, nous avons pu envoyer des donner sur une pipe entre deux Arduinos à distance via communication radio en utilisant Arduino IDE. | |||
== Carte électronique == | == Carte électronique == | ||
| Ligne 37 : | Ligne 319 : | ||
=== Routage === | === Routage === | ||
Voici le routage complet de la carte : | |||
[[Fichier:Routage complet.png|vignette|Routage complet|néant]] | |||
=== Réalisation === | === Réalisation === | ||
Une fois les carte reçu nous y avons soudé les composants. Voici le résultat final : | |||
[[Fichier:Manette soudure end.jpg|vignette|Manette soudée|néant]] | |||
== Programmation == | == Programmation == | ||
=== Code === | |||
Au niveau du code, nous avons réutiliser la LUFA avec cette fois ci le modèle Joystick pour que notre manette soit reconnue comme tel par le PC. | |||
Premièrement, nous avons modifié Descriptors.c pour qu'il soit cohérent avec notre carte. | |||
Désactiver l'axe Z car nos joysticks sont bi-directionnels: | |||
//HID_RI_USAGE(8, 0x32), /* Usage Z */ | |||
Mapper les valeurs de -100 à 100: | |||
HID_RI_LOGICAL_MINIMUM(8, -100), | |||
HID_RI_LOGICAL_MAXIMUM(8, 100), | |||
Usage de 8 boutons | |||
HID_RI_USAGE_PAGE(8, 0x09), /* Button */ | |||
HID_RI_USAGE_MINIMUM(8, 0x01), | |||
HID_RI_USAGE_MAXIMUM(8, 0x08), | |||
Ensuite nous avons modifié le makefile pour qu'il soit cohérent avec notre MCU.<syntaxhighlight lang="c"> | |||
MCU = atmega32u4 | |||
ARCH = AVR8 | |||
BOARD = NONE | |||
F_CPU = 16000000 | |||
F_USB = $(F_CPU) | |||
OPTIMIZATION = s | |||
TARGET = Joystick | |||
SRC = $(TARGET).c Descriptors.c $(LUFA_SRC_USB) | |||
LUFA_PATH = ../../LUFA | |||
</syntaxhighlight> | |||
Pour récupérer les valeurs analogiques des joysticks, nous avons utiliser les fonctions disponibles sur le cours de Xavier Redon, à savoir ''unsigned int '''ad_capture'''(void)'' et void '''''ad_init'''(unsigned char channel)'' | |||
On a pu tester l'envoi d'information en procédant de la façon suivante :<syntaxhighlight lang="c"> | |||
ad_init(JOYRIGHT_Y_CHANNEL); | |||
int joy_y = ad_capture(); | |||
ReportData->Y = joy_y; | |||
for (int i = 0 ; i < NB_BUTTONS ; i++) { | |||
if ( read_i(Buttons[i].number, Buttons[i].port) ){ | |||
ReportData->Button |= (1 << i); | |||
} | |||
} | |||
</syntaxhighlight> | |||
Finalement, la partie concernant le code a été assez simple puisqu'elle correspondait beaucoup à ce que nous avions pu faire précedemment avec la LUFA. | |||
De la sorte, nous envoyons des données, il faut maintenant voir si elles sont bien reçu. Pour ce faire, plusieurs outils ont pu être utilisé comme test avec evtest ou encore jstest. | |||
== Tests == | == Tests == | ||
=== Conclusion :=== | |||
Pour s'assurer que notre manette serait bien utilisable comme nous le souhaitions en jeu, nous avons voulu tester ça en condition réel avec un vrai jeu vidéo, ce que ne permettait pas jstest et evtest. Nous avons alors utilisé la reconnaissance de manette générique de Steam qui permet de s'adapter à beaucoup de jeux et nous avons donc pu jouer à Hollow Knight directement avec la manette ! | |||
== Rendus == | == Rendus == | ||
=== Archive GIT === | === Archive GIT === | ||
[https://gitea.plil.fr/tduwez/se3_2024_binome3 Lien Gitea] | |||
=== Autres rendus === | === Autres rendus === | ||
Version actuelle datée du 15 juin 2025 à 16:21
Programmateur AVR
Description du projet
Pour notre module de Premier Système Embarqué (PSE), il nous a été demandé de concevoir un PCB et programmer un microcontrôleur permettant de programmer un autre microcontrôleur (qui sera testé sur une Arduino Uno).
Etape 1 : Conception du circuit électronique
La première étape fut de mettre en place le circuit électronique via KiCad, cette carte est composée de :
- 1 Atmega8U2-A qui est notre microcontrôleur
- 1 quartz 8 Mhz
- 1 LED de contrôle présence tension
- 2 LED de test
- 1 port USB-A pour la communication avec l'ordinateur
- 1 connecteur ISP 2x3 pour la connection avec l'AVR à programmer
- 1 bouton de BOOT
- 1 bouton de RESET
- 1 bouton de test
Nous avons conçu le schéma suivant pour notre carte selon les indications données. Il a fallu environ entre 2 et 3 séances de deux heures pour la concevoir.

Etape 2 : Routage de la carte
Après avoir fait le schéma, nous avons fait une première version du routage de la carte qui fut modifié par souci d'optimisation (pour avoir notamment les composants sur une seule couche) par M.Boé, et nous avons obtenu ce routage suivant qui a été tiré en plusieurs fois.


Etape 3.0 : Fonctions pratiques
Nous avons conçu 3 fonctions primaires, permettant de nous simplifier la gestion des Entrées/Sorties.
Nous avons la fonction setup_io, qui permet, pour un pin et un port donné, de décider de l'assigner à une entrée ou une sortie, et d'activer ou non la résistance de PULL UP interne.
De plus, pour simplifier et éviter la répétition de code, le port utilisé est temporairement remplacé par un pointeur ayant l'adresse du port utilisé.
void setup_io(int pin, int is_output, int pull_up_active, char port){
volatile uint8_t* PORTx;
volatile uint8_t* PINx;
volatile uint8_t* DDRx;
if (port == 'b'){
PORTx = &PORTB;
PINx = &PINB;
DDRx = &DDRB;
}
if (port == 'c'){
PORTx = &PORTC;
PINx = &PINC;
DDRx = &DDRC;
}
if (port == 'd'){
PORTx = &PORTD;
PINx = &PIND;
DDRx = &DDRD;
}
if (is_output){
(*DDRx) |= 1<<pin;//met la led D1 en output
}else{
(*DDRx) |= 0<<pin;//met la led D1 en input
if (pull_up_active){
(*PORTx) |= 1<<pin;
}else{
(*PORTx) &= ~(1<<pin);
}
}
}
Nous avons la fonction active_o, qui permet, pour un pin et un port donné, de le mettre à 1 ou à 0. La même méthode est utilisé pour la gestion de port via un pointeur.
Remarque : Cette fonction est destinée à agir sur des pins qui ont été paramétrés en sortie au préalable.
void active_o(int pin, int is_active, char port ){
volatile uint8_t* PORTx;
volatile uint8_t* PINx;
volatile uint8_t* DDRx;
if (port == 'b'){
PORTx = &PORTB;
PINx = &PINB;
DDRx = &DDRB;
}
if (port == 'c'){
PORTx = &PORTC;
PINx = &PINC;
DDRx = &DDRC;
}
if (port == 'd'){
PORTx = &PORTD;
PINx = &PIND;
DDRx = &DDRD;
}
if (is_active){
(*PORTx) &= ~(1<<pin); //allume la led
}else{
(*PORTx) |= 1<<pin;
}
}
Nous avons la fonction read_i, qui permet, pour un pin et un port donné, de lire sa valeur.
Remarque : Cette fonction est destinée à lire sur des pins qui ont été paramétrés en entrée au préalable.
int read_i(int pin, char port){
int val = 0;
if (port == 'b'){
val = PINB;
}else if (port == 'c'){
val = PINC;
}else if (port == 'd'){
val = PIND;
}
int mask = 0;
mask = 1 << pin;
return (val & mask);
}
Etape 3.1 : Premier programme, interaction bouton/LED
int main (void) {
CLKSEL0 = 0b00010101; // sélection de l'horloge externe
CLKSEL1 = 0b00001111; // minimum de 8Mhz
CLKPR = 0b10000000; // modification du diviseur d'horloge (CLKPCE=1)
CLKPR = 0; // 0 pour pas de diviseur (diviseur de 1)
setup_io(LED_1, 1, 1, 'd'); // Led définie en OUTPUT sur le Port D
setup_io(LED_2, 1, 1, 'd'); //
setup_io(BUTTON, 0, 1, 'b'); // Bouton INPUT sur le Port B avec résistance de PULL UP interne
active_o(LED_2, 0, 'd'); // La LED 2 est éteinte
while(1) {
if( !read_i(BUTTON, 'b') ){
active_o(LED_1, 0, 'd'); //Si le bouton est activé, on allume la LED, sinon on l'éteint
}else{
active_o(LED_1, 1, 'd');
}
_delay_ms(100);
}
}
Ce programme permet basiquement d'allumer la LED lorsque que le bouton est appuyé. Il utilise les fonctions vues précédemment.
Vidéo démonstrative ci dessous :
Etape 4 : Deuxième programme, communication série PC/AVR
Pour communiquer avec le PC en série, nous avons utilisé la librairie LUFA.
Voici les modifications que nous avons apportées :
A la fin du main, nous avons paramétrés nos pins et rajouter une variable qui permettra de n'afficher sur la liaison série uniquement les changements d'états.
#define LED_1 0 // Port D #define LED_2 1 // Port D #define BUTTON 4 // Port B int button_toggle = -1; //evite d'imprimer un texte tout le temps //Initialisation setup_io(LED_1, 1, 1, 'd'); // Led OUTPUT setup_io(LED_2, 1, 1, 'd'); // Led setup_io(BUTTON, 0, 1, 'b'); // Bouton INPUT
Nous avons ensuite modifié la fonction CDC_Task pour y implémenter la logique souhaitée :
Quand on appuie sur le bouton, le PC recevra "Button pressed\r\n", et quand on le relâche, le PC recevra "Button not pressed\r\n"
void CDC_Task(void)
{
... //LUFA Code
//Notre code
int is_button_pressed = !read_i(BUTTON, 'b');
if( button_toggle != 0 && is_button_pressed ){
active_o(LED_1, 0, 'd'); //Si le bouton est activé, on allume la LED, sinon on l'éteint
ReportString = "Button pressed\r\n";
button_toggle = 0;
ActionSent = false;
}
if(button_toggle != 1 && !is_button_pressed ){
active_o(LED_1, 1, 'd');
button_toggle = 1;
ReportString = "Button not pressed\r\n";
ActionSent = false;
}
... //LUFA Code
}
Vidéo démonstrative ci dessous :
Description
Sujet 1 : Manette sans fil
Présentation du projet
Objectif
Concevoir et réaliser une manette de jeu sans fil basée sur un microcontrôleur avec communication radio. La manette permettra d’envoyer des commandes à un récepteur connecté à un système de jeu (par exemple, un PC ou une console), tout en respectant les contraintes d'autonomie et de modularité.
Cahier des charges
- Commandes analogiques via deux joysticks : un pour les déplacements, un pour la caméra.
- Retour visuel via des LED indiquant l’état de la manette (connexion, batterie faible, etc.).
- Commandes numériques : plusieurs boutons pour des actions spécifiques (tir, saut, pause, etc.).
- Communication radio entre la manette et le PC
- Gestion de l’alimentation hybride (filaire/batterie)
Spécification techniques
- Transmission des commandes au récepteur via le module radio NRF24L01
- Double alimentation hybride [Filaire/autonome]
- Batterie Lithium
- Recharge via USB
- Port USB pour programmer et utiliser en mode filaire
- Batterie Lithium
- Utilisation du processeur ATmega32u4 pour que la manette soit reconnue comme telle par un ordinateur.
- LED multicolores pour indiquer :
- le niveau de batterie ;
- la connexion avec le récepteur ;
- les différents modes de jeu.
Etape 1 : Schématique de la manette
La première étape à laquelle nous avons procédé pour la conception de notre manette est de faire une étude schématique de celle-ci. Nous devions tout d'abord ajouter les composants nécessaires à notre carte qui sont :
- l'ATmega32u4 pour la programmation
- le module radio NRF24L01 pour la communication
- le module de charge de la batterie
- le régulateur de tension
- le port USB-A
Ce qui nous donne ceci :

Mis à part les composants nécessaires pour le projet, nous avons réfléchit à des fonctionnalités que nous pourrions rajouter à notre manette. Nous sommes parti au départ sur une manette de jeux vidéos type Playstation pour nous inspirer sur les fonctionnalités. Nous avons donc penser à une manette comportant :
- 1 croix directionnelle (4 boutons)
- 4 boutons d'action
- 1 bouton "HOME"
- 2 joysticks et deux gachettes (pas quatre car il n'y avait pas assez de PIN sur le microcontrôlleur)
Cependant au fur et à mesure de notre routage, nous avons commencé à enlever des composants "superficiels" comme les gâchettes et le bouton "HOME" qui nous gênait sur le placement du module radio.
Nous nous sommes convenus sur ces fonctionnalités sur la manette :

Etape 2 : Routage de la manette
Lors de notre routage, nous devions gérer plusieurs contraintes :
- la proximité des quartz par rapport au module radio ainsi que du microcontrôlleur


- l'absence de terre autour de l'antenne radio

Nous avons eu aussi fait une erreur dans le routage qui nous empêchait de faire le reset du code du microcontrôleur que nous avons dû corriger physiquement.
Communication Radio :
Nous avons soudé les composants NRF, on n'a pas eu le temps d'essayer de communiquer directement avec. Cependant, nous avons fait des tests avec 2 modules/antennes "NRF24L01 + PA + LNA". On a notamment utiliser un site qui documente très bien la façon de procéder : https://passionelectronique.fr/tutorial-nrf24l01/. Finalement, nous avons pu envoyer des donner sur une pipe entre deux Arduinos à distance via communication radio en utilisant Arduino IDE.
Carte électronique
Schématique
Routage
Voici le routage complet de la carte :

Réalisation
Une fois les carte reçu nous y avons soudé les composants. Voici le résultat final :

Programmation
Code
Au niveau du code, nous avons réutiliser la LUFA avec cette fois ci le modèle Joystick pour que notre manette soit reconnue comme tel par le PC.
Premièrement, nous avons modifié Descriptors.c pour qu'il soit cohérent avec notre carte.
Désactiver l'axe Z car nos joysticks sont bi-directionnels:
//HID_RI_USAGE(8, 0x32), /* Usage Z */
Mapper les valeurs de -100 à 100:
HID_RI_LOGICAL_MINIMUM(8, -100),
HID_RI_LOGICAL_MAXIMUM(8, 100),
Usage de 8 boutons
HID_RI_USAGE_PAGE(8, 0x09), /* Button */
HID_RI_USAGE_MINIMUM(8, 0x01),
HID_RI_USAGE_MAXIMUM(8, 0x08),
Ensuite nous avons modifié le makefile pour qu'il soit cohérent avec notre MCU.
MCU = atmega32u4
ARCH = AVR8
BOARD = NONE
F_CPU = 16000000
F_USB = $(F_CPU)
OPTIMIZATION = s
TARGET = Joystick
SRC = $(TARGET).c Descriptors.c $(LUFA_SRC_USB)
LUFA_PATH = ../../LUFA
Pour récupérer les valeurs analogiques des joysticks, nous avons utiliser les fonctions disponibles sur le cours de Xavier Redon, à savoir unsigned int ad_capture(void) et void ad_init(unsigned char channel)
On a pu tester l'envoi d'information en procédant de la façon suivante :
ad_init(JOYRIGHT_Y_CHANNEL);
int joy_y = ad_capture();
ReportData->Y = joy_y;
for (int i = 0 ; i < NB_BUTTONS ; i++) {
if ( read_i(Buttons[i].number, Buttons[i].port) ){
ReportData->Button |= (1 << i);
}
}
Finalement, la partie concernant le code a été assez simple puisqu'elle correspondait beaucoup à ce que nous avions pu faire précedemment avec la LUFA.
De la sorte, nous envoyons des données, il faut maintenant voir si elles sont bien reçu. Pour ce faire, plusieurs outils ont pu être utilisé comme test avec evtest ou encore jstest.
Tests
Conclusion :
Pour s'assurer que notre manette serait bien utilisable comme nous le souhaitions en jeu, nous avons voulu tester ça en condition réel avec un vrai jeu vidéo, ce que ne permettait pas jstest et evtest. Nous avons alors utilisé la reconnaissance de manette générique de Steam qui permet de s'adapter à beaucoup de jeux et nous avons donc pu jouer à Hollow Knight directement avec la manette !
Rendus
Archive GIT
Autres rendus

Projet KiCAd programmateur AVR : Fichier:2024-PSE-G3-Prog.zip