« SE3Binome2023-9 » : différence entre les versions
Aller à la navigation
Aller à la recherche
Aucun résumé des modifications |
Aucun résumé des modifications |
||
| Ligne 20 : | Ligne 20 : | ||
==== c. Signalisation ==== | ==== c. Signalisation ==== | ||
[[Fichier:Beta.pdf|vignette|392x392px]] | |||
* LED de Surface : Installation de quatre LED de surface, deux à l'avant et deux à l'arrière, pour indiquer le sens de déplacement | * LED de Surface : Installation de quatre LED de surface, deux à l'avant et deux à l'arrière, pour indiquer le sens de déplacement | ||
=== 3. Contrôle et Programmation === | === 3. Contrôle et Programmation === | ||
| Ligne 33 : | Ligne 32 : | ||
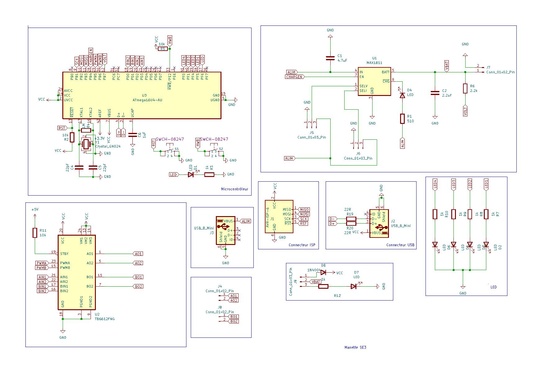
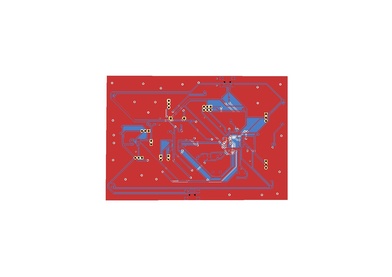
'''SCHEMA ET COMPOSANTE :''' | |||
1- Batterie (Lithium) | |||
[[Fichier:Screenshot 2024-06-12 214038.png|alt=Batterie|vignette]] | |||
| Ligne 64 : | Ligne 49 : | ||
---- | ---- | ||
[[Fichier:Batterie LIPO.jpg|alt=Batterie|vignette|batterie LIPO]] | |||
Version du 12 juin 2024 à 19:50
1. Objectif du Projet
Le but est de concevoir et développer une mini-voiture autonome en termes d'énergie, optimisée pour une utilisation efficiente de l'énergie, avec une gestion intelligente des mouvements et une signalisation intégrée.
2. Caractéristiques Techniques
a. Alimentation
- Batterie au Lithium : Utilisation d'une batterie au lithium pour l'alimentation principale, garantissant une autonomie élevée et une recharge efficace.
- Alimentation Intégrée : Mise en place d'un système d'alimentation intégré sur la carte pour une distribution optimale de l'énergie.
b. Propulsion
- Moteurs Continus : Deux moteurs continus de petite taille (2 cm) seront utilisés, positionnés au niveau des roues avant.
- Gestion des Moteurs : Utilisation d'un pont en H pour la réduction des contraintes mécaniques et l'inversion du sens de rotation des roues, favorisant une meilleure gestion de l'espace et du poids.
c. Signalisation
- LED de Surface : Installation de quatre LED de surface, deux à l'avant et deux à l'arrière, pour indiquer le sens de déplacement
3. Contrôle et Programmation
- Interface de Programmation : L'utilisateur peut programmer le trajet et les comportements de la voiture via un logiciel dédié sur ordinateur, qui communique avec la voiture via USB.
- Microcontrôleur : Le projet utilisera un microcontrôleur ATmega16u4 , la sélection dépendant de l'espace disponible pour la mémoire flash.
SCHEMA ET COMPOSANTE :
1- Batterie (Lithium)

