« SE3Binome2023-2 » : différence entre les versions
Aucun résumé des modifications |
Aucun résumé des modifications |
||
| Ligne 31 : | Ligne 31 : | ||
=Conception= | =Conception= | ||
==Schéma Kicad== | ==Schéma Kicad== | ||
La première étape et la réalisation de notre schéma sur kicad, notre schéma comporte tout les composants qui seront présents sur notre carte et leurs liaisons entre eux, nous avons utilisé les schéma déjà présents pour les composant tel que la batterie ou encore le micro contrôleurs. | |||
Pour intégrer la fonctionnalité du capteur de présence, nous avions besoin du schéma d'un capteur spécifique à notre utilisation (OPB733), malheureusement nous n'avons pas pu trouver le symbole de ce capteur sur internet nous avons donc du le créer seul grâce à l'éditeur de symbole Kicad et la datasheet, voici la page de la datasheet qui nous a aidé : | |||
[[Fichier:datasheetOPB733|thumb|center|400px]] | |||
Apres la mise en place de tout les symboles dans notre schématique, la voila finalisé : | |||
[[Fichier:notre_schéma.pdf|thumb|center|400px|Voici notre schéma finalisé]] | |||
La carte est prête à prendre forme et à être routé. | |||
==Routage== | |||
Grace à Pcbnew nous pouvons donner la forme que. nous voulons à notre carte et agencer les composants dessus de sorte à avoir la carte la plus ergonomique possible, les fils de cuivre ne doivent pas de croiser et les éléments doivent être placés minutieusement en fonction de leur utilité. | |||
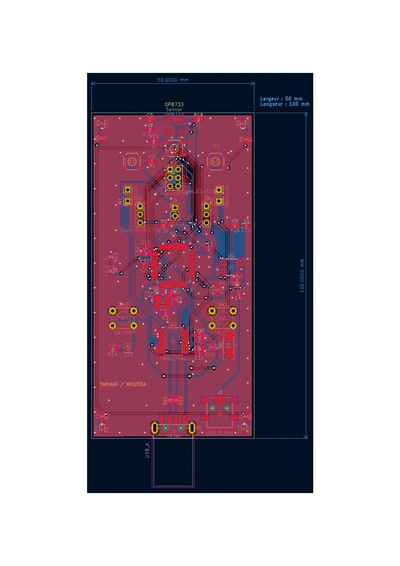
Apres maint correction de la part de notre enseignant, voici la version final de notre routage : | |||
[[Fichier:notre_rouage.pdf|thumb|center|400px|Voici notre routage finalisé]] | |||
=Programmation= | =Programmation= | ||
Version du 11 juin 2024 à 10:24
Notre Voiture
Objectif
Dans le cadre de notre troisième année, sur cette page nous vous présenterons me déroulement de notre projet consistant à réaliser notre premier système embarqué.
Nous allons réaliser une voiture électrique à l'aide d'une carte PCB, nous vous proposerons de nous suivre dans ce travail de la conception de la carte sur Kicad jusqu'à la programmation de notre notre voiture, pour la conception en effet nous avons utilisé le logiciel Kicad qui nous permettra de créer une carte correspondant à nos attentes et l'envoyer en prodcution.
Par la suite nous utiliserons un Arduino pour bootloader par ISP notre carte et pouvoir passer à la programmation en C.
Microcontrôleur
Pour éviter les problèmes avec les conversions analogique-vers-numérique, le choix se porte sur un microcontrôleur ATmega16u4 ou un ATmega32u4. La programmation peut ainsi se faire très simplement par DFU/USB.
Energie
Les cartes doivent pouvoir être alimentées de façon hybride : par un port USB pour la programmation et les tests, et par une batterie Lithium en mode autonome.
Fonctionnalités
Les cartes doivent comporter des LED commandées par le microcontrôleur, ainsi que d'autres fonctionnalités validées par un intervenant. Les fonctionnalités peuvent inclure :
- Deux moteurs pour les deux roues motrices
- Châssis simplifié
- Avancer
- Reculer
- Capteur de détection d'obstacle
- phares lumineux
- feux arrières
Conception
Schéma Kicad
La première étape et la réalisation de notre schéma sur kicad, notre schéma comporte tout les composants qui seront présents sur notre carte et leurs liaisons entre eux, nous avons utilisé les schéma déjà présents pour les composant tel que la batterie ou encore le micro contrôleurs.
Pour intégrer la fonctionnalité du capteur de présence, nous avions besoin du schéma d'un capteur spécifique à notre utilisation (OPB733), malheureusement nous n'avons pas pu trouver le symbole de ce capteur sur internet nous avons donc du le créer seul grâce à l'éditeur de symbole Kicad et la datasheet, voici la page de la datasheet qui nous a aidé :
Apres la mise en place de tout les symboles dans notre schématique, la voila finalisé :
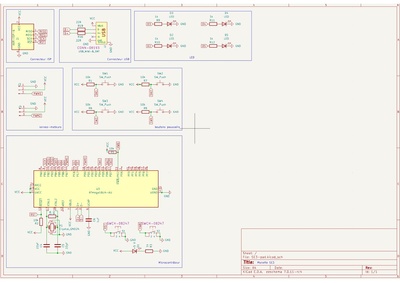
La carte est prête à prendre forme et à être routé.
Routage
Grace à Pcbnew nous pouvons donner la forme que. nous voulons à notre carte et agencer les composants dessus de sorte à avoir la carte la plus ergonomique possible, les fils de cuivre ne doivent pas de croiser et les éléments doivent être placés minutieusement en fonction de leur utilité.
Apres maint correction de la part de notre enseignant, voici la version final de notre routage :
Programmation
Conclusion
GIT
projet git : https://archives.plil.fr/yyahiani/Yassine_Bilal_1SE.git