« SE3Trinome2022-8 » : différence entre les versions
| Ligne 15 : | Ligne 15 : | ||
La réalisation de la carte électronique a débutée par la création du schéma électrique sur KICAD. Nous avons implémenté ce que nous aviosn déjà prévu (Chargeur, moteurs, microcontrolleur...), cependant, pour certaines fonctionnalités, des composants n'étaient pas disponibles dans les librairies Sparkfun disponibles. | La réalisation de la carte électronique a débutée par la création du schéma électrique sur KICAD. Nous avons implémenté ce que nous aviosn déjà prévu (Chargeur, moteurs, microcontrolleur...), cependant, pour certaines fonctionnalités, des composants n'étaient pas disponibles dans les librairies Sparkfun disponibles. | ||
Nous avons donc créé les schémas de ces composants, c'est-à-dire le module Bluetooth FP-BM70BLE01FC2 ainsi que le driver du moteur DRV8210DRL grâce aux informations de leurs datasheet disponible sur internet : | Nous avons donc créé les schémas de ces composants, c'est-à-dire le module Bluetooth '''FP-BM70BLE01FC2''' ainsi que le driver du moteur '''DRV8210DRL''' grâce aux informations de leurs datasheet disponible sur internet : | ||
- https://ww1.microchip.com/downloads/aemDocuments/documents/OTH/ProductDocuments/DataSheets/BM70_71-Bluetooth-Low-Energy-BLE-Module-DS60001372L.pdf | - Datasheet du module Bluetooth : ''https://ww1.microchip.com/downloads/aemDocuments/documents/OTH/ProductDocuments/DataSheets/BM70_71-Bluetooth-Low-Energy-BLE-Module-DS60001372L.pdf'' | ||
- | - Datasheet du driver du moteur : ''https://www.ti.com/lit/ds/slvsfy8b/slvsfy8b.pdf?ts=1683016270840&ref_url=https%253A%252F%252Fwww.google.com%252F'' | ||
Au final, nous obtenons au final ce schéma correspondant : | Au final, nous obtenons au final ce schéma correspondant : | ||
Version du 2 mai 2023 à 12:27
Projet SE3 : Premier Système
CAZIN Némo, CEGARRA Antoine, PALIFERRO Adrien
Objectifs fixés :
L'objectif principal de ce projet était de réaliser la commande d'une voiture au format 1:43 capable d'avancer et reculer à l'aie d'un programme informatique. Avant de commencer le projet, nous nous sommes fixé plusieurs petits objectif afin de mener au mieux le projet.
La voiture devait tout d'abord avancer, reculer, tourner à gauche et à droite. Des LEDs devait être allumées lorsque la voiture effectue un déplacement.
Pour la commande de la voiture, nous voulions qu'elle soit commandée grâce à une commande Bluetooth et pilotée depuis un smartphone. Une application devait alors être faites pour gérer les déplacements. MIT App Inventor permet de gérer des communications Bluetooth et est simple d'utilisation.
Afin de pouvoir implémenter toutes ses fonctionnalités, nous devions réaliser une carte électronique gérée par un microcontrôleur ATMega16u2. D'autres module devaient être ajoutés pour la bonne réalisation de nos objectifs fixés.
La carte électronique :
La réalisation de la carte électronique a débutée par la création du schéma électrique sur KICAD. Nous avons implémenté ce que nous aviosn déjà prévu (Chargeur, moteurs, microcontrolleur...), cependant, pour certaines fonctionnalités, des composants n'étaient pas disponibles dans les librairies Sparkfun disponibles.
Nous avons donc créé les schémas de ces composants, c'est-à-dire le module Bluetooth FP-BM70BLE01FC2 ainsi que le driver du moteur DRV8210DRL grâce aux informations de leurs datasheet disponible sur internet :
- Datasheet du module Bluetooth : https://ww1.microchip.com/downloads/aemDocuments/documents/OTH/ProductDocuments/DataSheets/BM70_71-Bluetooth-Low-Energy-BLE-Module-DS60001372L.pdf
- Datasheet du driver du moteur : https://www.ti.com/lit/ds/slvsfy8b/slvsfy8b.pdf?ts=1683016270840&ref_url=https%253A%252F%252Fwww.google.com%252F
Au final, nous obtenons au final ce schéma correspondant :
ZIP : Fichier:Voiture CCP.zip
Application Bluetooth :
Nous nous étions fixé comme objectif que la voiture devait être contrôlée grâce à une application Bluetooth. Nous avons alors décidé de réaliser cette application grâce au site MIT App Inventor, ce site est simple d'utilisation et permet de gérer des communications Bluetooth facilement. De plus, le temps a était investi surtout dans la carte électronique donc apprendre et programmer par nous même dans un langage de programmation nouveau aurait été compliqué pour nous.
Nous avons décider que les informations envoyées par communication Bluetooth serait sous forme hexadécimale. Le programme informatique du côté de l'ATMega16u2 recevra et traitera alors les informations reçues.
L'application devait avoir un aspect simple d'utilisation et sobre afin de faciliter l'expérience de l'utilisateur. L'application amènerait l'utilisateur sur une page permettant de choisir à quelle appareil Bluetooth se connecter. Un statut indiquant si le smartphone est connecté ou non à l'appareil est aussi présent. L'élément le plus important de la page est le bloc de déplacement, composé de 4 boutons représentant des flèches directionnelles afin de piloter la voiture.
Lorsque nous avions terminé l'application pour piloter grâce à des flèches directionnelles, nous nous sommes rendu compte que nous pourrions réaliser aussi un pilotage par gyroscope. En effet, les informations transmises pour les déplacements reste les mêmes donc du côté du programme informatique, rien ne change. Nous avons deux moyens de piloter la voiture : une par appuis sur des flèches directionnelles, et une seconde par inclinaisons du smartphone.
Voilà des captures d'écran montrant l'aspect et les fonctionnalités de l'application :

Contrôle par touche

Contrôle par gyroscope


Pour réaliser cette application, il faut du code en interne, voici les codes que nous avons utilisé :
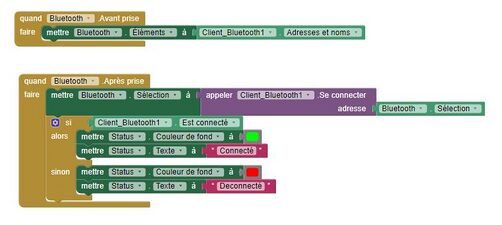
Bloc de connexion Bluetooth

Bloc de gestion des touches
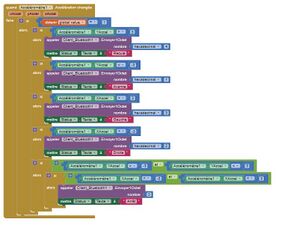
Bloc de gestion du gyroscope



Après avoir programmé l'application, nous devions récupérer les informations et les traiter du côté de la carte électronique. Pour cela, nous implémenterons un programme informatique codé en C dans la mémoire de l'ATMega16u2.
Programme informatique
Notes :
Séance 28/02
Réalisation du PCB : Alim et chargeur à finir (faire gaffe aux deux nomenclatures)
Séance 14/03
Finition du schéma (alim, chargeur, led, port Série, Bluetooth àfinir), début routage
https://docs.rs-online.com/f3fa/0900766b81623cc8.pdf*
Séance 21/03
Schéma fini, manque des footprints à faire pour 3 composants --> routage
Séance 11/04
Routage terminé, retouche à faire (plan de masse etc..)
Séance 2/05
Réception de la carte
Rédaction du wiki