« SE3Trinome2022-2 » : différence entre les versions
Aucun résumé des modifications |
Aucun résumé des modifications |
||
| Ligne 63 : | Ligne 63 : | ||
== Programmation de la voiture == | == Programmation de la voiture == | ||
[[Fichier:PCB1.jpg|vignette|Notre carte imprimée]] | [[Fichier:PCB1.jpg|vignette|90|Notre carte imprimée]] | ||
Version du 27 mai 2023 à 18:50
GIT
Voici le lien vers notre GIT : https://archives.plil.fr/ccariat/SE3Trinome2022-2_Projet_2km.git
Projections
- Dimensions : voiture 1:43 dans la mesure du possible l'électronique sera caché sous la carrosserie
- Contrôle de la voiture : déplacement programmé (Bluetooth si le temps nous le permet)
- Énergie : batterie LiPo accrochée sur le toit, il n'y aura qu'un port USB pour l'information et le rechargement de la batterie intégrée à la voiture
- Éclairage : deux phares avant via deux LED RGB qui pourront servir d'IHM (infos sur la charge de la batterie par exemple)
- Direction : roues avant orientables grâce à un moteur pas à pas glissière
Liste du matériel :
- Voiture 1:43
- Atmega 16u2
- Mini-moteur continu avec réducteur + pilote DRV8210DRLR
- Moteur pas à pas glissière
- Connecteur USB_A
- 2 Leds RGB
- Batterie LiPo
- Chargeur MAX1811
- Module de communication Bluetooth BM71BLE01FC2
Schématique
• Composants créés
Pour mener à bien la conception assistée par ordinateur nous avons dû créer des composant directement via Kicad.

Module Bluetooth
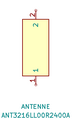
Antenne du module Bluetooth

Driver du moteur DC



• Empreintes créés
Afin de se rendre compte de la place que prend chaque composant il a fallut trouver ou créer des empreintes pour chaque élément du montage.
Voici celles que nous avons construite :
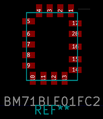
Module Bluetooth

Antenne du module Bluetooth
Moteur DC



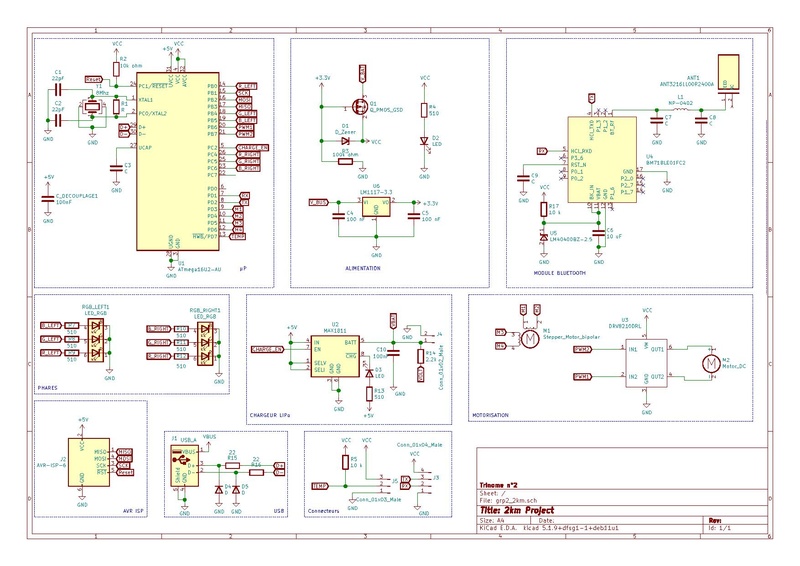
Voici le schéma électronique produit pour ce projet :
• PCB
Ci-dessous les images de la carte routée. mettre contraintes ==> bluetooth antenne, condenstaeurs, usb + et - mm longueur


Vous pouvez télécharger le dossier comportant la partie CAO Fichier:Pcb binome2.zip.
Programmation de la voiture

• Premier Programme
Une fois la carte imprimée et soudée avec les premiers composants, nous la testons avec un premier programme de test pour clignoter les leds.
Viens ensuite la programmation d'un moteur à courant continu.