« SE4Binome2024-3 » : différence entre les versions
Aller à la navigation
Aller à la recherche
| Ligne 127 : | Ligne 127 : | ||
// Déclaration des différentes tâches | // Déclaration des différentes tâches | ||
process task[NB_TASKS] = { | process task[NB_TASKS] = { | ||
{0x700, | {0x700,Serial_Led,0}, | ||
{0x600, | {0x600, LED1_blink,0}, | ||
{0x500, | {0x500, Serial_Message,0} | ||
}; | }; | ||
| Ligne 184 : | Ligne 182 : | ||
cli(); | cli(); | ||
LED_init(); | LED_init(); | ||
USART_Init(MYUBRR); | |||
init_minuteur(256,PERIODE); | init_minuteur(256,PERIODE); | ||
for(int i=1;i<NB_TASKS;i++) init_pile(i); | for(int i=1;i<NB_TASKS;i++) init_pile(i); | ||
| Ligne 206 : | Ligne 205 : | ||
#define PERIODE 20 | #define PERIODE 20 | ||
#define FOSC 16000000 // Clock Speed | |||
#define BAUD 9600 | |||
#define MYUBRR FOSC/16/BAUD-1 | |||
#define LED1 PC0 | #define LED1 PC0 | ||
| Ligne 213 : | Ligne 215 : | ||
#define LED5 PD7 | #define LED5 PD7 | ||
#define NB_TASKS | #define NB_TASKS 3 | ||
typedef struct process{ | typedef struct process{ | ||
| Ligne 222 : | Ligne 224 : | ||
void LED_init(void); | void LED_init(void); | ||
void USART_Init(unsigned int ubrr); | |||
void LED1_blink(void); | void LED1_blink(void); | ||
void LED2_blink(void); | void LED2_blink(void); | ||
| Ligne 227 : | Ligne 230 : | ||
void LED4_blink(void); | void LED4_blink(void); | ||
void LED5_blink(void); | void LED5_blink(void); | ||
void USART_Transmit(unsigned char data); | |||
unsigned char USART_Receive(void); | |||
void Serial_Led(); | |||
void Serial_Message(); | |||
#endif | #endif | ||
| Ligne 237 : | Ligne 244 : | ||
PORTC |= (1<<LED1)|(1<<LED2); | PORTC |= (1<<LED1)|(1<<LED2); | ||
PORTD |= (1<<LED3)|(1<<LED4)|(1<<LED5); | PORTD |= (1<<LED3)|(1<<LED4)|(1<<LED5); | ||
} | |||
void USART_Init(unsigned int ubrr) | |||
{ | |||
/*Set baud rate */ | |||
UBRR0H = (unsigned char)(ubrr>>8); | |||
UBRR0L = (unsigned char)ubrr; | |||
/*Enable receiver and transmitter */ | |||
UCSR0B = (1<<RXEN0)|(1<<TXEN0); | |||
/* Set frame format: 8data, 2stop bit */ | |||
UCSR0C = (1<<USBS0)|(3<<UCSZ00); | |||
} | } | ||
| Ligne 272 : | Ligne 290 : | ||
_delay_ms(50); | _delay_ms(50); | ||
} | } | ||
} | |||
void Serial_Led(){ | |||
while(1){ | |||
if(USART_Receive() == 'a') LED2_blink(); | |||
} | |||
} | |||
void Serial_Message(){ | |||
unsigned char data; | |||
while(1){ | |||
data = USART_Receive(); | |||
USART_Transmit(data); | |||
} | |||
} | |||
void USART_Transmit(unsigned char data) | |||
{ | |||
/* Wait for empty transmit buffer */ | |||
while (!(UCSR0A & (1<<UDRE0))) | |||
; | |||
/* Put data into buffer, sends the data */ | |||
UDR0 = data; | |||
} | |||
unsigned char USART_Receive(void) | |||
{ | |||
/* Wait for data to be received */ | |||
while (!(UCSR0A & (1<<RXC0))) | |||
; | |||
/* Get and return received data from buffer */ | |||
return UDR0; | |||
} | } | ||
</syntaxhighlight> | </syntaxhighlight> | ||
Version du 15 octobre 2024 à 12:03
Réalisation d'un shield arduino
Schématique
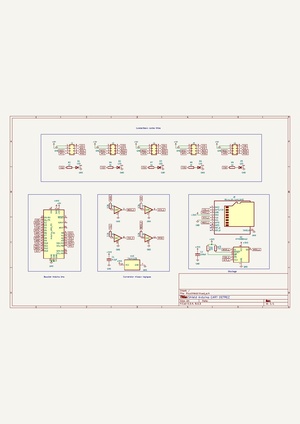
Routage

PINOUT
| LED1 | PC0 |
| LED2 | PC3 |
| LED3 | PD1 |
| LED4 | PD4 |
| LED5 | PD7 |
Brasage du shield
shield nu

shield fini

Test du shield

Programmation ordonnanceur
Code ordonnanceur
#include "Fonctions.h"
#define RESTORE_REGISTERS() \
asm volatile ( \
"pop r31 \n\t" \
"pop r30 \n\t" \
"pop r29 \n\t" \
"pop r28 \n\t" \
"pop r27 \n\t" \
"pop r26 \n\t" \
"pop r25 \n\t" \
"pop r24 \n\t" \
"pop r23 \n\t" \
"pop r22 \n\t" \
"pop r21 \n\t" \
"pop r20 \n\t" \
"pop r19 \n\t" \
"pop r18 \n\t" \
"pop r17 \n\t" \
"pop r16 \n\t" \
"pop r15 \n\t" \
"pop r14 \n\t" \
"pop r13 \n\t" \
"pop r12 \n\t" \
"pop r11 \n\t" \
"pop r10 \n\t" \
"pop r9 \n\t" \
"pop r8 \n\t" \
"pop r7 \n\t" \
"pop r6 \n\t" \
"pop r5 \n\t" \
"pop r4 \n\t" \
"pop r3 \n\t" \
"pop r2 \n\t" \
"pop r1 \n\t" \
"pop r0 \n\t" \
"out __SREG__, r0 \n\t" \
"pop r0 \n\t" \
);
#define SAVE_REGISTERS() \
asm volatile ( \
"push r0 \n\t" \
"in r0, __SREG__ \n\t" \
"push r0 \n\t" \
"push r1 \n\t" \
"push r2 \n\t" \
"push r3 \n\t" \
"push r4 \n\t" \
"push r5 \n\t" \
"push r6 \n\t" \
"push r7 \n\t" \
"push r8 \n\t" \
"push r9 \n\t" \
"push r10 \n\t" \
"push r11 \n\t" \
"push r12 \n\t" \
"push r13 \n\t" \
"push r14 \n\t" \
"push r15 \n\t" \
"push r16 \n\t" \
"push r17 \n\t" \
"push r18 \n\t" \
"push r19 \n\t" \
"push r20 \n\t" \
"push r21 \n\t" \
"push r22 \n\t" \
"push r23 \n\t" \
"push r24 \n\t" \
"push r25 \n\t" \
"push r26 \n\t" \
"push r27 \n\t" \
"push r28 \n\t" \
"push r29 \n\t" \
"push r30 \n\t" \
"push r31 \n\t" \
);
int currentTask = 0;
//uint16_t SP = 0x700;
// FONCTIONS
// Déclaration des différentes tâches
process task[NB_TASKS] = {
{0x700,Serial_Led,0},
{0x600, LED1_blink,0},
{0x500, Serial_Message,0}
};
void init_pile(int N){
uint16_t tempSP = SP;
SP = task[N].stackPointer;
uint16_t adresse=(uint16_t)task[N].addressFunction;
asm volatile("push %0" : : "r" (adresse & 0x00ff) );
asm volatile("push %0" : : "r" ((adresse & 0xff00)>>8) );
SAVE_REGISTERS();
task[N].stackPointer = SP;
SP = tempSP;
}
void init_minuteur(int diviseur,long periode){
TCCR1A=0; // Le mode choisi n'utilise pas ce registre
TCCR1B=(1<<CTC1); // Réinitialisation du minuteur sur expiration
switch(diviseur){
case 8: TCCR1B |= (1<<CS11); break;
case 64: TCCR1B |= (1<<CS11 | 11<<CS10); break;
case 256: TCCR1B |= (1<<CS12); break;
case 1024: TCCR1B |= (1<<CS12 | 1<<CS10); break;
}
// Un cycle prend 1/F_CPU secondes.
// Un pas de compteur prend diviseur/F_CPU secondes.
// Pour une periode en millisecondes, il faut (periode/1000)/(diviseur/F_CPU) pas
// soit (periode*F_CPU)/(1000*diviseur)
OCR1A=F_CPU/1000*periode/diviseur; // Calcul du pas
TCNT1=0; // Compteur initialisé
TIMSK1=(1<<OCIE1A); // Comparaison du compteur avec OCR1A
}
void scheduler(){
currentTask ++;
if(currentTask == NB_TASKS) currentTask = 0; // ordonnanceur en mode Round Robin
}
// Déclaration d'un tableau de processus
ISR(TIMER1_COMPA_vect, ISR_NAKED){ // Procédure d'interruption
/* Sauvegarde du contexte de la tâche interrompue */
SAVE_REGISTERS();
task[currentTask].stackPointer = SP;
/* Appel à l'ordonnanceur */
scheduler();
/* Récupération du contexte de la tâche ré-activée */
SP = task[currentTask].stackPointer;
RESTORE_REGISTERS();
asm volatile ( "reti" );
}
int main(void){
cli();
LED_init();
USART_Init(MYUBRR);
init_minuteur(256,PERIODE);
for(int i=1;i<NB_TASKS;i++) init_pile(i);
SP = task[0].stackPointer;
sei();
task[0].addressFunction();
}
Code des tâches
#ifndef FONCTIONS_H
#define FONCTIONS_H
// Inclusions de bibliothèques nécessaires
#include <avr/io.h>
#include <avr/interrupt.h>
#include <stdint.h>
#include <util/delay.h>
#define CTC1 WGM12 // Meilleur nom pour le bit
#define PERIODE 20
#define FOSC 16000000 // Clock Speed
#define BAUD 9600
#define MYUBRR FOSC/16/BAUD-1
#define LED1 PC0
#define LED2 PC3
#define LED3 PD1
#define LED4 PD4
#define LED5 PD7
#define NB_TASKS 3
typedef struct process{
uint16_t stackPointer; // stack pointer, défini le début du process
void (*addressFunction)(void); // adresse de l'instruction en cours
int state; // état de la fonction (prêt, en cours, terminé)
}process;
void LED_init(void);
void USART_Init(unsigned int ubrr);
void LED1_blink(void);
void LED2_blink(void);
void LED3_blink(void);
void LED4_blink(void);
void LED5_blink(void);
void USART_Transmit(unsigned char data);
unsigned char USART_Receive(void);
void Serial_Led();
void Serial_Message();
#endif
#include "Fonctions.h"
void LED_init(){
DDRC |= (1<<LED1) | (1<<LED2);
DDRD |= (1<<LED3) | (1<<LED4) | (1<<LED5);
PORTC |= (1<<LED1)|(1<<LED2);
PORTD |= (1<<LED3)|(1<<LED4)|(1<<LED5);
}
void USART_Init(unsigned int ubrr)
{
/*Set baud rate */
UBRR0H = (unsigned char)(ubrr>>8);
UBRR0L = (unsigned char)ubrr;
/*Enable receiver and transmitter */
UCSR0B = (1<<RXEN0)|(1<<TXEN0);
/* Set frame format: 8data, 2stop bit */
UCSR0C = (1<<USBS0)|(3<<UCSZ00);
}
void LED1_blink(){
while(1){
PORTC ^= (1<<LED1);
_delay_ms(150);
}
}
void LED2_blink(){
while(1){
PORTC ^= (1<<LED2);
_delay_ms(100);
}
}
void LED3_blink(){
while(1){
PORTD ^= (1<<LED3);
_delay_ms(250);
}
}
void LED4_blink(){
while(1){
PORTD ^= (1<<LED4);
_delay_ms(350);
}
}
void LED5_blink(){
while(1){
PORTD ^= (1<<LED5);
_delay_ms(50);
}
}
void Serial_Led(){
while(1){
if(USART_Receive() == 'a') LED2_blink();
}
}
void Serial_Message(){
unsigned char data;
while(1){
data = USART_Receive();
USART_Transmit(data);
}
}
void USART_Transmit(unsigned char data)
{
/* Wait for empty transmit buffer */
while (!(UCSR0A & (1<<UDRE0)))
;
/* Put data into buffer, sends the data */
UDR0 = data;
}
unsigned char USART_Receive(void)
{
/* Wait for data to be received */
while (!(UCSR0A & (1<<RXC0)))
;
/* Get and return received data from buffer */
return UDR0;
}
Exemple d'utilisation
Clignotement de 5 Leds asynchrones
Liens
Lien du git : https://gitea.plil.fr/vdetrez/SE4_PICO_DETREZ_CART