« SE3Groupe2025-6 » : différence entre les versions
| Ligne 76 : | Ligne 76 : | ||
== Travail effectué == | == Travail effectué == | ||
Séance 1 : Découverte projet + Création GIT et WIKI + Choix projet réalisé | Séance 1 : Découverte projet + Création GIT et WIKI + Choix projet réalisé | ||
Séance 2 : Schématique OK (Mr Boé) | Empreintes OK -> placement des composants (à faire) | |||
== Bilan == | == Bilan == | ||
Version du 5 mars 2026 à 16:18
Programmation des systèmes embarqués
Carte électronique
Carte réalisée en utilisant le logiciel KiCAD : Fichier:2025-PSE-6-Prog.zip.
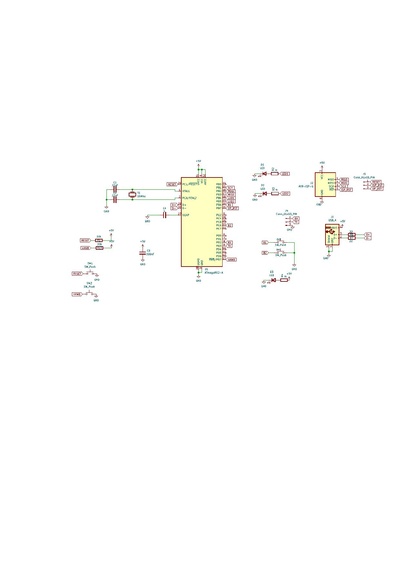
Schéma électronique de la carte :
Résultat du routage :

Vue 3D de la carte :

Photo de la carte soudée :


Vidéo très courte et en basse résolution de la carte en fonctionnement :
A venir Media:2025-PSE-BB-PROG-video.mp4
Programmation
Code pour faire clignoter les LEDs : Ok
Code pour allumer/éteindre les LEDs avec les boutons : OK
Bilan
J'indique où j'en suis arrivé à la fin des séances.
Eventuellement la vidéo brève du fonctionnement complet du programmateur : Media:2025-PSE-BB-PROG-final.mp4.
Premier système embarqué
Archive GIT
Mon archive GIT pour le projet KiCAD et pour les programmes : [1].
Structure : Matériel (y compris production - gerber, bill of materials) / Logiciel / Documentation (e.g. documentation technique).
Description du système embarqué
Objectif : Réaliser une montre connectée qui affiche l'heure et capture les BPM de l'utilisateur + autres fonctions si réalisables (podomètre, alerte téléphone si BPM anormal)
Carte électronique
Carte réalisée en utilisant le logiciel KiCAD :
Schéma électronique de la carte :
Résultat du routage :
Photo de la carte soudée :
Vidéo très courte et en basse résolution de la carte en fonctionnement :
Travail effectué
Séance 1 : Découverte projet + Création GIT et WIKI + Choix projet réalisé Séance 2 : Schématique OK (Mr Boé) | Empreintes OK -> placement des composants (à faire)
Bilan
J'indique où j'en suis arrivé à la fin des séances.
Eventuellement la vidéo brève du fonctionnement complet du programmateur :