SE3Groupe2024-2
Description
Objectif
L'objectif de ce projet est de concevoir une station domotique capable de collecter et d'afficher des mesures provenant de capteurs. Elle devra également être capable d'activer des actionneurs, tels que des LEDs, des cadenas ou tout autre dispositif, en fonction des besoins.
Cahier des charges
La station domotique devra permettre l'affichage des informations suivantes concernant une pièce :
- Température ambiante ;
- Taux d'humidité ;
- Présence humaine (via capteur de mouvement) ;
- D'autres paramètres pourront être ajoutés en fonction de l'avancement du projet.
Elle devra aussi permettre de contrôler différents actionneurs dans la pièce, tels que :
- L'éclairage, en fonction de la présence d'une personne (via un capteur de mouvement) ;
- D'autres dispositifs pourront être intégrés en fonction des besoins.
Des capteurs et actionneurs supplémentaires pourront être ajoutés si le projet atteint ses objectifs initiaux.
Spécification techniques
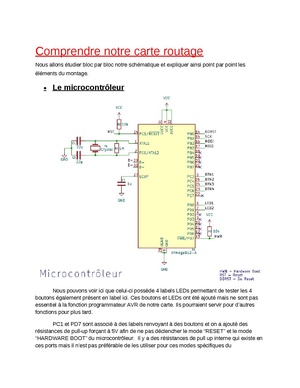
- Microcontrôleur
Le projet nécessite un microcontrôleur, qui contiendra le programme, et qui communiquera avec les autres composants via les GPIOs.
Nous avons le choix entre plusieurs modèles de microcontrôleur : ATmega16u4, AT90USB1286, AT90USB1287.
Voici un tableau comparatif afin de sélectionner le plus adapté pour notre usage :
| Caractéristiques | ATmega16U4 | AT90USB1286 | AT90USB1287 |
| Architecture | AVR 8 bits | AVR 8 bits | AVR 8 bits |
| Mémoire Flash | 16 KB | 128 KB | 128 KB |
| RAM (SRAM) | 1.25 KB | 4 KB | 4 KB |
| EEPROM | 512 Bytes | 4 KB | 4 KB |
| Fréquence d'horloge max. | 16 MHz | 16 MHz | 16 MHz |
| Nombre de broches GPIO | 26 | 48 | 48 |
| Interfaces de communication | UART, SPI, I²C, USB 2.0 | UART, SPI, I²C, USB 2.0 | UART, SPI, I²C, USB 2.0 |
| Contrôleur USB intégré | Oui (USB 2.0) | Oui (USB 2.0) | Oui (USB 2.0) |
| Taille des registres | 8 bits | 8 bits | 8 bits |
| Nombre de broches | 32 | 64 | 64 |
| Différences principales | Conçu pour des applications compactes avec
moins de mémoire et d'E/S |
Plus de mémoire, adapté à des projets complexes nécessitant de nombreuses E/S et de la mémoire | Similaire au AT90USB1286 mais avec des fonctionnalités spécifiques
pour certaines configurations USB (e.g., modes host/OTG). |
| Lien documentation | https://www.microchip.com/en-us/product/atmega16u4 | https://www.microchip.com/en-us/product/at90usb1286 | https://www.microchip.com/en-us/product/at90usb1287 |
Avec ce tableau, on constate que l'ATmega16U4 ne possède pas suffisamment de broches GPIOs. Cependant l'AT90USB1286 et son homologue l'AT90USB1287 dépassent notre cadre d'usage (utilisation mode USB spécifique HOST/OTG, etc... ).
Le compromis est donc d'opter pour un ATmega32u4 afin d'avoir suffisamment de broches et de mémoire.
| Caractéristiques | ATmega32U4 |
|---|---|
| Architecture | AVR 8 bits |
| Mémoire Flash | 32 KB |
| RAM (SRAM) | 2.5 KB |
| EEPROM | 1 KB |
| Fréquence d'horloge max. | 16 MHz |
| Nombre de broches GPIO | 26 |
| Interfaces de communication | UART, SPI, I²C, USB 2.0 |
| Contrôleur USB intégré | Oui (USB 2.0) |
| Taille des registres | 8 bits |
| Nombre de broches | 32 |
| Différences principales | Conçu pour des applications nécessitant un contrôleur USB intégré, avec une mémoire et un nombre de broches intermédiaires |
Datasheet ATmega32u4 :

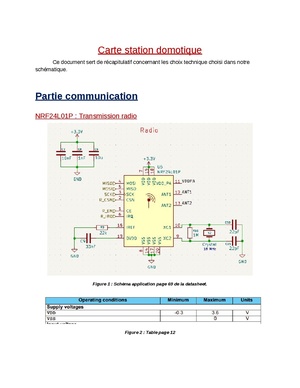
- Communication
La station utilisera une puce NRF24L01 pour la communication sans fil entre les différents actionneurs et capteurs.
La communication entre le pc et la station se fera quant à elle en USB.
Datasheet NRF24L01 :

- Énergie
La station sera alimentée de manière hybride, selon les scénarios suivants : - Par un port USB, pour la programmation, les tests et la configuration avec affichage sur moniteur PC ; - Par une batterie Lithium, en mode autonome pour une utilisation prolongée (avec affichage écran LCD dans un second temps). Les capteurs/actionneurs seront alimentées de manière hybride, selon les scénarios suivants : - Par un port USB, pour la programmation, les tests et la configuration ; - Par une batterie Lithium, en mode autonome pour son usage définitif. Modèles de batterie à notre disposition :
- Batterie 3.7V 100 mAh, connecteur molex mâle ;
- Batterie 3.7V 300 mAh, connecteur molex mâle ;
Nous allons ajouter la possibilité de recharger notre batterie depuis notre carte via le composant MAX1811. La carte se rechargera lorsqu'elle sera branché en USB mais l'USB fournit du 5V, ce qui peut nuire à certains de nos composants... Pour proteger les composants, nous allons ajouter un régulateur de tension pour garder une tension de 3,3V sur l'ensemble de notre carte. Datasheet du chargeur et du régulateur :


- Affichage
Dans un premier temps, les informations seront remontées via la connexion USB à un programme sur PC (selon les exigences du cahier des charges).
Dans un second temps, un écran LCD sera utilisé pour afficher les données directement sur la station, offrant ainsi une solution autonome, sous réserve du temps disponible pour cette implémentation.
Datasheet de l'écran graphique utilisé :

Pour programmer l'écran, les professeurs veulent qu'on reste sur du C pur. On a alors décidé de coder notre écran via l'API "glcd.h".
L'écran sera composé de menu permettant de naviguer parmis pleins de capteurs qui sont enregistrer pour permettre la consultation de la valeur renvoyé par celle selectionné.
Les boutons intégrés sur la carte permettent la navigation.
- Diverses
La carte comportera également une led afin d'indiquer son état d'alimentation ainsi que deux autres leds permettant de faire des tests de programmation.
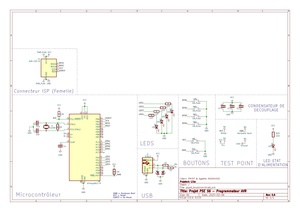
Programmateur AVR
Cours / Tutoriel
https://rex.plil.fr/Enseignement/Systeme/Systeme.PSE/systeme063.html
Schématique
Notre schéma électrique
Conception de notre schéma électrique
Documents relatifs à la conception du kicad de la carte


Vue 3D

Fichier kicad
Brasure


Programmation
Test leds et boutons
Afin de vérifier que notre carte fonctionne correctement après brasure, on code un programme permettant d'allumer une led périodiquement puis un autre programme allumant une led lorsqu'un bouton poussoir est pressé.
Afin de mettre le programme sur notre carte, on vérifie au préalable que notre carte est bien reconnue en tant que périphérique USB à l'aide de la commande lsusb.


Une fois notre carte détectée, on appuie sur le bouton HWB puis reset afin de mettre notre carte en mode DFU. On téléverse ensuite notre programme sur la carte à l'aide d'un makefile préalablement codé en tapant la commande make upload.
LUFA
Afin de pouvoir faire de notre carte un périphérique USB, nous allons utiliser la LUFA (Lightweight USB Framefork for AVRs).
- Tout d'abord, nous avons codé un programme permettant de voir si la lufa détecte bien les boutons-poussoirs de notre carte comme des points d'accès d'entrées en affichant sur le minicom quel bouton-poussoir était pressé par l'utilisateur.
- Notre code se trouve dans le répertoire se ci-dessous : https://gitea.plil.fr/ahouduss/se3_2024_B2/src/branch/main/01%20-%20Programmateur%20AVR/programmation/lufa-LUFA-210130-NSI/se/VirtualSerial On place le programme dans notre carte à l'aide de la commande make upload puis on lance la commande minicom afin de voir si le bouton pressé est bien affiché via la liaison série. On configure une vitesse et un flux adaptés pour le minicom.
- Nous avons ensuite implémenté un programme permettant d'allumer une led différente à chaque bouton-poussoir pressé.
Station
Schématique
Notre schéma électrique

Comprendre notre schéma
Routage
Brasure
Programmation
Capteurs
Capteur de température
Capteur de mouvement
Actionneur
Détecteur de mouvement
Resources utilisés
Lien GIT : https://gitea.plil.fr/ahouduss/se3_2024_B2.git
Lien tutoriel utilisation de puces à distance : NRF24L01