SE3Binome2023-3
Voiture VigiCar
Notre projet est une voiture commandée par USB. Lorsqu'elle détecte un obstacle, elle s'arrête et déclenche un signal d'alerte (Warning). Quand l'obstacle est enlevé, elle continue son chemin.
L'utilisateur peut donner différentes instructions : avancer, reculer, s’arrêter pendant une durée définie, ou exécuter une instruction tant qu'aucun obstacle n'est détecté.
Limitations et fonctionnalités
- Taille de la carte : 10x10 cm maximum
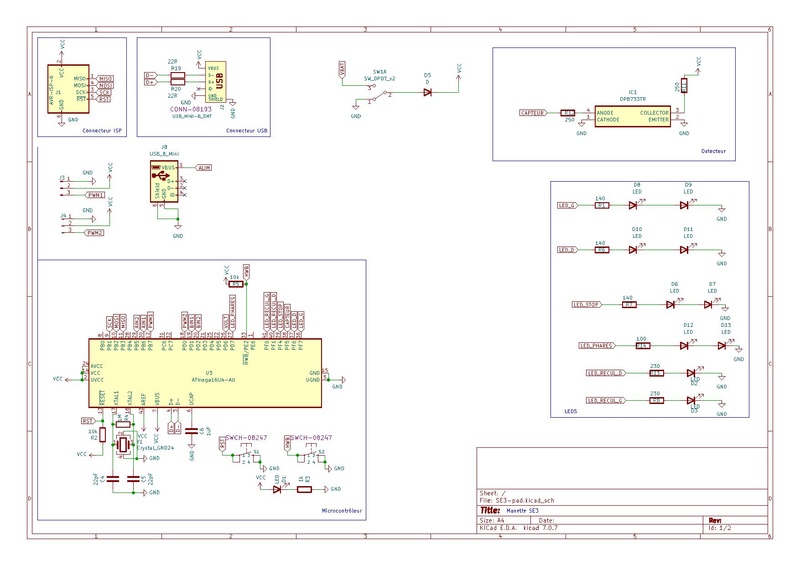
- Éclairage :
- 4 LEDs oranges à l'avant et à l'arrière pour les feux de warning
- 2 LEDs jaunes à l'avant pour les phares avant
- 2 LEDs blanches à l'arrière pour les feux de recul
- 2 LEDs rouges à l'arrière pour les feux stop
- Programmation : Par USB
- Gestion de l’énergie : Par batterie LiPo
- Détection d'obstacles : Capteur de proximité placé à l'avant
Matériel

- Batterie LiPo
- Puce de contrôle MAX1811
- 4 LEDs oranges
- 2 LEDs jaunes (qui ressortent oranges au final)
- 2 LEDs blanches
- 2 LEDs rouges
- 2 Mini moteurs continus & Pilotes des moteurs
- Capteur de proximité
- Port USB
Déroulé du Projet
Séance du 5 Mars 2024
Nous avons choisi d'intégrer un capteur de proximité à notre voiture pour améliorer sa réactivité aux obstacles. Pour assurer une autonomie adéquate, nous utiliserons une alimentation par batterie. De plus, la voiture sera capable d'exécuter divers programmes prédéfinis, lui permettant de naviguer de manière autonome tout en répondant aux commandes de l'utilisateur.
Séance du 12 Mars 2024
Nous avons finalisé le choix des composants et commencé la conception du schéma électrique de notre PCB. Cependant, le problème qu'il pourrait y avoir en mettant les LEDs en série comme nous l'avons fait est qu'elle ne seront pas alimentées correctement. Nous allons donc les mettre en parallèle afin de résoudre cette complication. Dans tout les cas, cela ne posera pas de problème pour la programmation des LEDs.
Séance du 19 Mars 2024
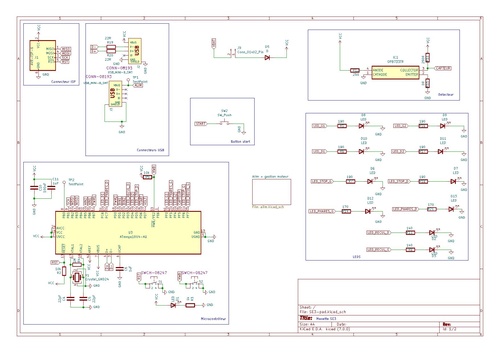
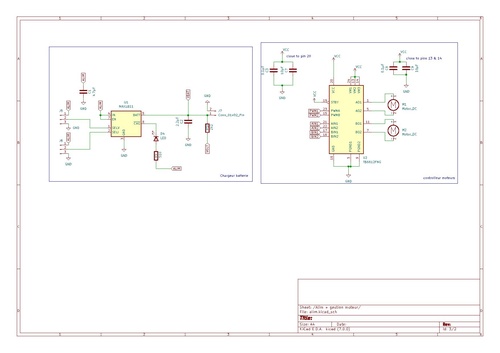
Le schéma électrique est terminé. Nous avons corrigé le layout du PCB en respectant les contraintes de taille, le problème d'alimentation des LEDs, et nous avons rajouté les éléments manquants tels que l'alimentation et le contrôleur moteur.


Séance du 2 Avril 2024
Création de notre archive GIT pour la gestion des versions et le suivi du projet.
- Voici notre lien git : VigiCar Git Archive
Séance du 7 Mai 2024

Nous avons reçu notre PCB. Nous commençons à souder les composants (ATmega16u4, Quartz, Port USB, ISP, etc.). L'ATmega16u4 a déjà un Bootloader préinstallé.
Séance du 14 Mai 2024
Nous avons continué les soudures, en particulier le contrôleur de moteur. Il reste maintenant à le tester.
Séance du 21 Mai 2024
Lors de la séance précédente, nous avions fini de souder le contrôleur de moteur. Nous soudons un des moteurs à l'aide de fils que nous replierons sur eux-mêmes à la fin. Pour tester le moteur, nous écrivons un programme.
Dans un premier temps, nous écrivons un programme qui consiste seulement à faire tourner le moteur :

Ensuite, nous cherchons à manipuler la vitesse de rotation du moteur. Nous écrivons un programme permettant d'augmenter progressivement la vitesse de ce dernier :

Séance du 28 Mai 2024

Lors de cette séance, nous nous sommes séparés pour, d'une part, réparer les problèmes de soudure des LEDs, souder le capteur de proximité et d'autre part, préparer un code pour manipuler les LEDs et vérifier leur fonctionnement.
Concernant la soudure du capteur de proximité, nous avons opté pour du "bricolage". En effet, le capteur devant être monté à la verticale, il faut relier les PINs du dessus à la carte. Pour cela nous utiliserons des fils.
A la première tentative, le capteur ne fonctionnait pas, nous avons donc cherché la cause de ce problème (test de la camera, mesure de la tension dans les PINs, etc.). En regardant la datasheet du capteur nous voyons que le capteur ne supporte une température de 260°C que pendant 10 secondes. Nous l'avions donc bien rendu inutilisable.
Nous avons donc ressouder un autre capteur en faisant plus attention. Reste maintenant à le programmer.