SE4Binome2024-6
GIT
Nos codes et nos conceptions kicad sont disponibles via notre GIT : https://gitea.plil.fr/yyahiani/pico_yahiani_zongo.git
Objectif
Nous avons pour objectif avec les 3 autres binômes de notre groupe de construire un pico-ordinateur qui intégrera plusieurs éléments essentiels. Voici les composants que nous allons inclure :
- Un processeur de type microcontrôleur : Cela constituera le cœur de notre pico-ordinateur, permettant de gérer toutes les opérations.
- Un clavier : Pour l'entrée de données, il nous permettra d'interagir facilement avec notre dispositif.
- Un dispositif d'affichage : Cela nous permettra de visualiser les informations et les résultats des opérations effectuées par notre pico-ordinateur.
- Un système d'exploitation : Celui-ci sera stocké dans la mémoire flash du microcontrôleur, garantissant un fonctionnement fluide de notre appareil.
- Une mémoire de masse : Nous prévoyons d'ajouter une mémoire qui ira au-delà de la mémoire flash, pour stocker davantage de données.
- Un dispositif de communication externe : Cela nous permettra d'interagir avec d'autres dispositifs ou réseaux.
Enfin, pour assurer la communication entre tous ces éléments, nous allons mettre en place un bus série. Cela facilitera les échanges de données et garantira une intégration harmonieuse de chaque composant. Pour ce qui concerne notre binome notre travail portera sur la realisation d'une carte ecran qui devra remplir les taches precisées dans l'énoncé du projet.
En premier lieu, nous avons d'abord réalisé un shield qui nous servira, dans le cas où la carte mère n'abouti pas, à pouvoir tester nos cartes filles à l'aide d'un Arduino uno pour prototyper le coeur d'une carte mère.
Shield
Realisation
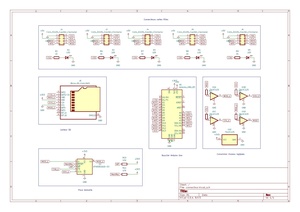
Nous nous sommes aidés des indications du professeur en première séance pour réaliser le schéma de notre shield, nous y avons rajouté une puce mémoire AT45DB161D, la datasheet nous a permis de savoir comment intégrer notre puce memoire dans notre schéma:
Ci dessous vous pouvez voir la version finale du routage concernant le PCB du Bouclier;

Apres reception de notre PCB nous avons entamé la phase de soudure de nos composants. le Bouclier après soudure se présente comme suit :

Suite à une erreur d'orientation de nos broches; connecter l'arduino et notre Bouclier devenait une tâche beaucoup plus "compliquée" que prévu, mais grâce à une idée ingénieuse proposée par nos encadrants (Mr BOE et Mr REDON) nous y sommes parvenus. Le bouclier se connecte donc à l'arduino de la façon suivante:


Test fonctionnement
Après avoir connecté notre bouclier et l'arduino nous avons effectué les tests et constaté l'allumage des differentes LED; attestant du bon fonctionnement de notre bouclier.


Accomplissement des taches
Ordonnanceur
Ici la première tâche à realiser est de programmer le minuteur 1 de l'ATMega328p de sorte à ce qu'il génère une interruption toutes les 20ms. Pour cela nous nous sommes inspiré du code donné par l'un de nos encadrants (Mr REDON) et avons le minuteur 1 programmé comme ceci:

Le Timer 1 est configuré en mode ""CTC"" c'est à dire qu'il se réinitialise automatiquement à chaque fois qu'il atteint la valeur OCR1A.Le prescaler est configuré à 256, ce qui divise la fréquence de l'horloge système(16000000hz)par 256.Nous avons donc une nouvelle frequence d'horloge à 62500 hz, ce qui implique que les coups d'horloge (ticks) s'effectuent toutes les 16us. Le timer compte jusqu'à 1250 ticks, ce qui génère une interruption toutes les 20 ms.