SE4Binome2024-8
Wiki du projet Pico BONNINGRE Louis LECOMTE Antoine Ce projet est le principal de notre semestre, il s'agit de réaliser un pico-ordinateur qui comporte plusieurs fonctionnalités qui sont implémentées grâce à des cartes filles que l'on vient brancher sur la carte mère.
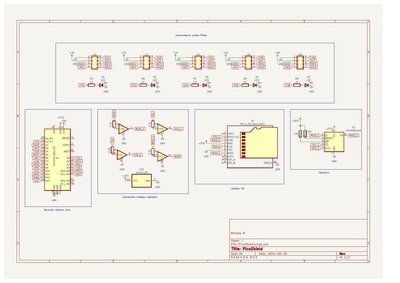
PicoShield
Pour débuter cet ordinateur, nous allons tester les fonctionnalités de base grâce à un shield que nous connectons à une carte arduino.
23 septembre 2024
Modification du PCB du shield, ajout d'une puce mémoire dans le cas ou la connexion à la carte SD ne fonctionne pas.

30 septembre 2024
Nous avons soudé les composants sur la carte puis testé les led et un afficheur 7 segments connecté sur un des ports pour carte fille


1 octobre 2024
Nous avons testé le connecteur de carte SD, à l'aide de la bibliothèque arduino 'SD.h'. La carte est bien reconnue, nous pouvons voir la taille mémoire de la carte et les fichiers présents dessus.

Nous avons testé toutes les fonctionnalités de base avec le PicoShield, nous pouvons donc passer à la suite.
Ordonnanceur
Nous avons commencé par réaliser un ordonnanceur simple pour effectuer deux taches simples (clignotement de deux LEDs). Comme visible sur la vidéo, la LED bleue et la LED orange clignotent bien à des fréquences différentes, la LED rouge clignote à chaque appel de l'ordonnanceur.
Voici le code de notre ordonnanceur avec les deux taches de clignotement, la définition de la structure des taches ainsi que portSAVE_Registers() et portRESTORE_Registers() sont dans le fichier ordonnanceur.h
#include <avr/io.h>
#include <avr/interrupt.h>
#include <util/delay.h>
#include "ordonnanceur.h"
#define NB_TASKS 2
int courant = 0;
task Taches[NB_TASKS] = {
{Led2, 0x0700},
{Led1, 0x0600}
};
void init_minuteur(int diviseur,long periode){
TCCR1A=0; // Le mode choisi n'utilise pas ce registre
TCCR1B=(1<<CTC1); // Réinitialisation du minuteur sur expiration
switch(diviseur){
case 8: TCCR1B |= (1<<CS11); break;
case 64: TCCR1B |= (1<<CS11 | 11<<CS10); break;
case 256: TCCR1B |= (1<<CS12); break;
case 1024: TCCR1B |= (1<<CS12 | 1<<CS10); break;
}
// Un cycle prend 1/F_CPU secondes.
// Un pas de compteur prend diviseur/F_CPU secondes.
// Pour une periode en millisecondes, il faut (periode/1000)/(diviseur/F_CPU) pas
// soit (periode*F_CPU)/(1000*diviseur)
OCR1A=F_CPU/1000*periode/diviseur; // Calcul du pas
TCNT1=0; // Compteur initialisé
TIMSK1=(1<<OCIE1A); // Comparaison du compteur avec OCR1A
}
void init_task(int t){
uint16_t oldSP = SP;
SP = Taches[t].stack;
uint16_t adresse = (uint16_t)Taches[t].start;
asm volatile("push %0" : : "r" (adresse & 0x00ff));
asm volatile("push %0" : : "r" ((adresse & 0xff00) >> 8));
portSAVE_Registers();
Taches[t].stack = SP;
SP = oldSP;
}
ISR(TIMER1_COMPA_vect, ISR_NAKED){
/* Sauvegarde du contexte de la tâche interrompue */
portSAVE_Registers();
Taches[courant].stack = SP;
/* Appel à l'ordonnanceur */
ordonnanceur();
/* Récupération du contexte de la tâche ré-activée */
SP = Taches[courant].stack;
portRESTORE_Registers();
asm volatile("reti");
}
void ordonnanceur(){
PORTC ^= 0x01; // On fait clignoter une des led à chaque fois que l'ordonnanceur est appelé
courant++;
if (courant == NB_TASKS) courant = 0;
}
void Led1(){
while(1){
PORTD ^= 0x80;
_delay_ms(333);
}
}
void Led2(){
while(1){
PORTD ^= 0x10;
_delay_ms(400);
}
}
int main(void){
DDRD |= 0x92; //Déclaration des sorties
DDRC |= 0x01;
init_minuteur(256, PERIODE);
for(int i = 1; i < NB_TASKS; i++) init_task(i);
sei();
SP = Taches[courant].stack;
Taches[courant].start();
return 0;
}
Une fois l’ordonnanceur capable de lancer deux tâches en parallèle, nous nous sommes attaqués à la communication série de la carte par USB. Pour ce faire, nous utilisons l’application minicom coté PC qui permet une connexion série. Il faut initialiser les paramètres de la connexion, notre carte renvoie le message reçu dans le terminal.
Ci joint les deux fonctions responsables de l'envoi et de la reception de données par le protocole série, l'initialisation et les constantes sont dans le fichier pico_serial.h sur notre GIT
<syntaxhighlight lang="c" line="1" start="1">
void Serial_Transmit(unsigned char data)
{
/* Wait for empty transmit buffer */ while (!(UCSR0A & (1 << UDRE0))); /* Put data into buffer, sends the data */ UDR0 = data;
}
unsigned char Serial_Receive(void) {
/* Wait for data to be received */ while (!(UCSR0A & (1 << RXC0))); /* Get and return received data from buffer */ return UDR0;
} </syntaxhiglight>



Nous ajoutons maintenant une tache permettant d'écrire le caractère reçu par la communication série dans l'écran 7 segments par la communication SPI.
Carte mère
Parmis notre groupe, nous somme le binôme en charge de la carte mère. L'ébauche du PCB est disponible sur le Git de notre projet.