« SE3Groupe2025-19 » : différence entre les versions
Aucun résumé des modifications |
|||
| (15 versions intermédiaires par le même utilisateur non affichées) | |||
| Ligne 32 : | Ligne 32 : | ||
[[File:2025_PSE-B19-PROG-carte_led.jpg|thumb|center|400px| carte]] | [[File:2025_PSE-B19-PROG-carte_led.jpg|thumb|center|400px| carte]] | ||
| Ligne 77 : | Ligne 53 : | ||
Code pour faire clignoter les LEDs : | Code pour faire clignoter les LEDs : | ||
[[Média: | [[Média:Clig led 19.pdf|<code>clig__led_19.c</code>]] | ||
Vidéo: | Vidéo: | ||
[[ | [[Média:2025-PSE-B19-PROG-clig.G19video.mp4]] | ||
Code pour faire clignoter les LEDs par les boutons: | Code pour faire clignoter les LEDs par les boutons: | ||
[[Média: | [[Média:Bouton led 19.pdf|<code>bouton_led_19.c</code>]] | ||
Vidéo: | Vidéo: | ||
[[ | [[Média:2025-PSE-B19-PROG-bouton.G19video.mp4]] | ||
== Bilan == | == Bilan == | ||
Séance 1 : Schématique + routage (demande fabrication carte) | |||
Séance 2 : Cours (1h) + Soudage des premiers composants — uniquement le microcontrôleur soudé, manque de temps pour aller plus loin. | |||
Séance 3 : Préparation et rédaction des codes ( | |||
[[Média:Clig led 19.pdf|<code>clig__led_19.c</code>]], gestion des boutons;[[Média:Bouton led 19.pdf|<code>bouton_led_19.c</code>]]) | |||
Séance 4 : Soudage des composants restants (carte complètement soudée) + finalisation du code. Premiers tests : problèmes de compilation et d'exécution détectés. | |||
Travail à domicile (hors séance) : Correction des erreurs de compilation et d'exécution. Tests concluants — les LEDs s'allument correctement. | |||
= Premier système embarqué = | = Premier système embarqué = | ||
| Ligne 113 : | Ligne 95 : | ||
== Carte électronique == | == Carte électronique == | ||
Carte réalisée en utilisant le logiciel <code>KiCAD</code> : [[ | Carte réalisée en utilisant le logiciel <code>KiCAD</code> : [[Fichier:2025-PSE-19-PROG-Pse.zip|ma carte électronique]]. | ||
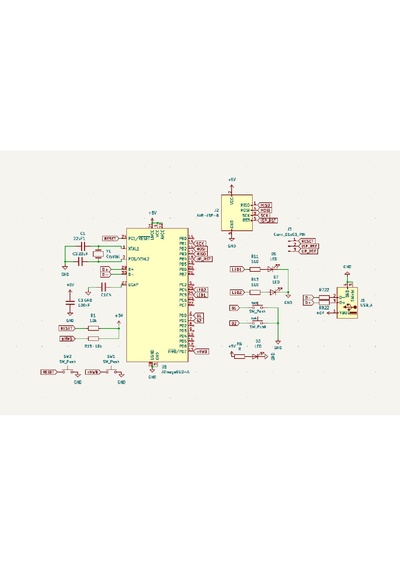
Schéma électronique de la carte : | Schéma électronique de la carte : | ||
[[Fichier:Capture d'écran 2026-04-09 221446.png|centré|vignette|400x400px|Mon schéma électronique]] | |||
[[ | |||
Résultat du routage : | Résultat du routage : | ||
[[Fichier:Capture d'écran 2026-04-09 221632.png|centré|vignette|400x400px|Mon routage]] | |||
Vue 3D de la carte : | |||
[[Fichier:Capture d'écran 2026-04-09 221805.png|centré|vignette|400x400px|Vue 3D]] | |||
Photo de la carte soudée : | Photo de la carte soudée : | ||
| Ligne 129 : | Ligne 111 : | ||
Vidéo très courte et en basse résolution de la carte en fonctionnement : | Vidéo très courte et en basse résolution de la carte en fonctionnement : | ||
[[ | [[Média:2025-PSE-B19-systeme-video.mp4]] | ||
== Travail effectué == | == Travail effectué == | ||
| Ligne 187 : | Ligne 169 : | ||
• Tentative de correction : certains problèmes ont été résolus, d’autres restent en cours. | • Tentative de correction : certains problèmes ont été résolus, d’autres restent en cours. | ||
5ème séance (''20/03/2026'') : Corrections avancées | |||
• Correction de la commande de la pompe (polarisation et sens). | |||
• Ajustement des connexions critiques. | |||
• Stabilisation du fonctionnement du montage. | |||
• Début de la réflexion sur la partie alimentation. | |||
6ème séance (''24/03/2026'') : Refonte de l’alimentation et finalisation du schéma | |||
• Remplacement du régulateur initial par un convertisseur DC-DC (MCP1640Bx-xCHY) afin de convertir 3,7 V en 5 V pour la pompe. | |||
• Correction de l’empreinte de l’inductance (erreur initiale). | |||
• Validation du transistor 2N7002. | |||
• Finalisation complète du schéma. | |||
7ème séance (''31/03/2026'') : Routage et validation finale | |||
• Réalisation du routage du PCB sous KiCad. | |||
• Organisation et optimisation des pistes. | |||
• Vérification des règles de conception (DRC). | |||
• Finalisation du routage. | |||
• Validation finale du projet par le professeur. | |||
== Bilan == | == Bilan == | ||
Eventuellement la vidéo brève du fonctionnement complet du programmateur : [[ | Eventuellement la vidéo brève du fonctionnement complet du programmateur : [[Média:2025-PSE-B19-systeme-final.mp4]]. | ||
Version actuelle datée du 9 avril 2026 à 20:46
Programmation des systèmes embarqués
Carte électronique
Carte réalisée en utilisant le logiciel KiCAD : Fichier:2025-PSE-B19-PROG.zip.
Schéma électronique de la carte :
Résultat du routage :

Vue 3D de la carte :

Photo de la carte soudée :


Programmation
Code pour faire clignoter les LEDs :
clig__led_19.c
Vidéo:
Média:2025-PSE-B19-PROG-clig.G19video.mp4
Code pour faire clignoter les LEDs par les boutons:
bouton_led_19.c
Vidéo:
Média:2025-PSE-B19-PROG-bouton.G19video.mp4
Bilan
Séance 1 : Schématique + routage (demande fabrication carte)
Séance 2 : Cours (1h) + Soudage des premiers composants — uniquement le microcontrôleur soudé, manque de temps pour aller plus loin.
Séance 3 : Préparation et rédaction des codes (
clig__led_19.c, gestion des boutons;bouton_led_19.c)
Séance 4 : Soudage des composants restants (carte complètement soudée) + finalisation du code. Premiers tests : problèmes de compilation et d'exécution détectés.
Travail à domicile (hors séance) : Correction des erreurs de compilation et d'exécution. Tests concluants — les LEDs s'allument correctement.
Premier système embarqué
Archive GIT
Mon archive GIT pour le projet KiCAD et pour les programmes : [1].
Archive privée. Binôme comme administrateur. Boé et Redon comme administrateur.
Ajouter un .gitignore pour KiCAD et langage C.
Structure avec matériel (y compris production - gerber, bill of materials) / logiciel / documentation (e.g. documentation technique).
Description du système embarqué
Objectif : Conception d'un système d'irrigation automatisé intelligent basé sur l'ATmega32U4.
Description : Le dispositif mesure l'humidité du sol en temps réel pour déclencher une pompe dès qu'un seuil critique est atteint. Le système intègre une interface USB permettant de monitorer les données sur ordinateur, d'ajuster les paramètres de contrôle et d'analyser l'historique d'irrigation. Des capteurs de pH et de température complètent le dispositif pour une gestion optimisée de la culture.
Carte électronique
Carte réalisée en utilisant le logiciel KiCAD : Fichier:2025-PSE-19-PROG-Pse.zip.
Schéma électronique de la carte :

Résultat du routage :

Vue 3D de la carte :

Photo de la carte soudée :
{kind=link}
Vidéo très courte et en basse résolution de la carte en fonctionnement :
Média:2025-PSE-B19-systeme-video.mp4
Travail effectué
1ère scéance (17/02/2026) :
• Validation officielle : L'idée du projet de système d'irrigation automatique a été validée par l'enseignant.
• Étude technique : Nous avons finalisé la liste des composants nécessaires (capteurs d'humidité, pompe, microcontrôleur ATmega32U4) après une phase de recherche sur leurs spécifications.
• Conception Électronique (KiCad) :
- Initialisation du projet sous KiCad.
- Début de la saisie du schéma de principe (Schematic).
- Sélection des symboles pour le microcontrôleur et les interfaces de puissance pour la pompe.
2ème scéance (03/03/2026) : Finalisation du schéma et premier retour du professeur
• Conception Électronique (KiCad) :
Finalisation du schéma électronique du système d’irrigation automatique.
Vérification globale du schéma et des connexions entre les composants.
Présentation du schéma au professeur pour validation.
Analyse du schéma par le professeur et réception d’un premier retour contenant des modifications à effectuer.
3ème scéance (10/03/2026) : Modifications après retour du professeur
Suite au retour du professeur sur notre schéma, nous avons apporté les corrections demandées.
Nous avons :
corrigé certaines connexions du schéma ;
ajusté l’organisation du schéma afin d’améliorer sa lisibilité ;
vérifié que les modifications respectent les remarques du professeur.
4ème séance (17/03/2026) : Vérification et problèmes restants
• Relecture du schéma sous KiCad avec Mr Boe.
• Identification d’erreurs dans la commande de la pompe.
• Problèmes de polarisation du transistor et de sens de commande (inversé).
• Tentative de correction : certains problèmes ont été résolus, d’autres restent en cours.
5ème séance (20/03/2026) : Corrections avancées
• Correction de la commande de la pompe (polarisation et sens).
• Ajustement des connexions critiques.
• Stabilisation du fonctionnement du montage.
• Début de la réflexion sur la partie alimentation.
6ème séance (24/03/2026) : Refonte de l’alimentation et finalisation du schéma
• Remplacement du régulateur initial par un convertisseur DC-DC (MCP1640Bx-xCHY) afin de convertir 3,7 V en 5 V pour la pompe.
• Correction de l’empreinte de l’inductance (erreur initiale).
• Validation du transistor 2N7002.
• Finalisation complète du schéma.
7ème séance (31/03/2026) : Routage et validation finale
• Réalisation du routage du PCB sous KiCad.
• Organisation et optimisation des pistes.
• Vérification des règles de conception (DRC).
• Finalisation du routage.
• Validation finale du projet par le professeur.
Bilan
Eventuellement la vidéo brève du fonctionnement complet du programmateur : Média:2025-PSE-B19-systeme-final.mp4.