« SE3Binome2023-1 » : différence entre les versions
(→PINOUT) |
|||
| Ligne 13 : | Ligne 13 : | ||
Le programme sera téléversé par un connecteur USB. | Le programme sera téléversé par un connecteur USB. | ||
Réalisation d'une voiture avec deux modes de fonctionnements. | |||
- La voiture sera capable de suivre des instructions données par l'utilisateur via USB (Avancer à une vitesse maximale pendant 30 secondes, tourner à droite pendant 10 secondes, reculer lentement pendant 15 secondes, etc) | |||
- Le second mode est en autonomie. La voiture avance et lorsqu'elle détecte un mur, puis elle tourne à droite jusqu'à ce qu'elle puisse avancer à nouveau. | |||
=== Tâches à réaliser === | === Tâches à réaliser === | ||
Version du 14 avril 2024 à 08:26
Projet voiture Autonome
Cahier des charges
La voiture doit être capable de:
- Avancer / Reculer
- Tourner
- Allumer des leds
- Eviter un mur
Description
Réalisation d'une voiture autonome qui est capable d'effectuer toute les tâches citées plus haut.
Le programme sera téléversé par un connecteur USB.
Réalisation d'une voiture avec deux modes de fonctionnements.
- La voiture sera capable de suivre des instructions données par l'utilisateur via USB (Avancer à une vitesse maximale pendant 30 secondes, tourner à droite pendant 10 secondes, reculer lentement pendant 15 secondes, etc)
- Le second mode est en autonomie. La voiture avance et lorsqu'elle détecte un mur, puis elle tourne à droite jusqu'à ce qu'elle puisse avancer à nouveau.
Tâches à réaliser
- Conception mécanique
- Réalisation du PCB
- Gestion de l'énergie de la batterie
- Programmation du µC
- Gestion de chargement d'un programme
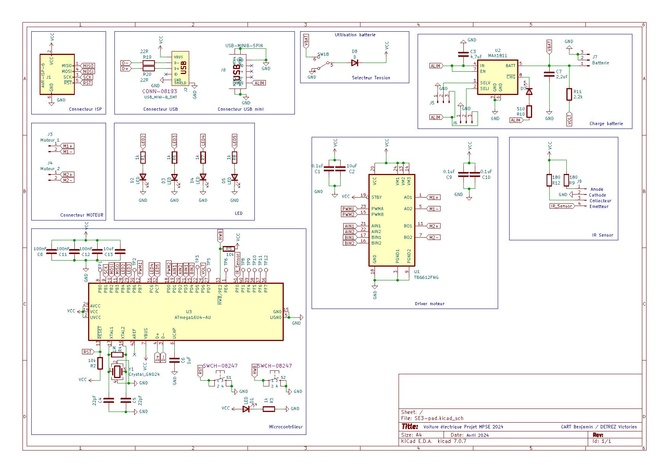
Conception du PCB
Schématique
Routage
PINOUT
| NOM | PIN |
|---|---|
| EMETTEUR | PF0 |
| LED2 | PB4 |
| LED3 | PB5 |
| LED4 | PC6 |
| LED5 | PC7 |
| PWMA | PB7 |
| PWMB | PD0 |
| AIN1 | PD1 |
| AIN2 | PD2 |
| BIN1 | PD3 |
| BIN2 | PD4 |
| MISO | PB3 |
| MOSI | PB2 |
| SCK | PB1 |
| RST | RESET |
| NOM | PIN |
|---|---|
| M1+ | A01 |
| M1- | A02 |
| M2+ | B01 |
| M2- | B02 |
Réalisation du PCB / conception mécanique:
Partir sur l’un des plan de la manette
prendre en compte la taille de la batterie
Prendre en compte la position des moteurs
Prévoir de la place pour ajouter une roue libre
Prévoir de la place pour les capteurs de suivi de ligne
Pas de contrainte esthétique
Faire un listing des connectiques
Gestion de l’énergie de la batterie
Regarder les specs de la batterie et mettre un système d’arrêt d’urgence
Gestion de la charge
Programmation du µC
Se renseigner sur comment le coder avec un ATMega32u4
Gestion du chargement du programme
Se renseigner sur comment faire
Liste des composants
- µC ATMega16U4 (contient un bootloader)
- 5 Leds de contrôle (Moteurs, alimentation, transmission, détecteur de ligne)
- driver moteur
- Batterie LiPo 3.7V
- Connecteurs Molex 3pin 1mm
Archive
GIT : https://archives.plil.fr/vdetrez/DETREZ_CART_programmation_des_systemes_embarques.git