« SE3Groupe2024-5 » : différence entre les versions
Aller à la navigation
Aller à la recherche
Aucun résumé des modifications |
Aucun résumé des modifications |
||
| Ligne 14 : | Ligne 14 : | ||
* Interface pour visualiser les informations sur ordinateur | * Interface pour visualiser les informations sur ordinateur | ||
=== Spécification techniques | === Spécification techniques === | ||
* angle de détection large (-90°,90°) | * angle de détection large (-90°,90°) | ||
Version du 25 février 2025 à 14:12
Description
Objectif
Concevoir et réaliser un mini sonar à partir d'un émetteur-récepteur ultrason, avec un traitement des données effectué par un micro-contrôleur. Les données seront ensuite communiquées par ondes radio à un ordinateur. Le système devra être capable de fonctionner aussi bien sur batterie que connecté en USB à un ordinateur, et devra au minimum comporter des LED d'indication.
Cahier des charges
- Contrôle et traitement des informations de l'émetteur-récepteur ultrason
- Pilotage par moteur de l'angle de l'émetteur-récepteur ultrason
- Retour de l'information par des LED sur la carte
- Gestion de l'alimentation par USB
- Communication sans fil avec un ordinateur
- Gestion de l'alimentation sur batterie
- Interface pour visualiser les informations sur ordinateur
Spécification techniques
- angle de détection large (-90°,90°)
- deux émetteurs/récepteurs à ultrason HC-SR04
- Recharge par USB
- transmission des données par onde radio via un module RF (bluetooth)
- Batteries Li-ion
- une LED tricolore, pour notamment informer des différents niveaux de batterie
- un afficheur 7 segments pour le débogage
- interface machine via une application python
- microcontroleur atmega
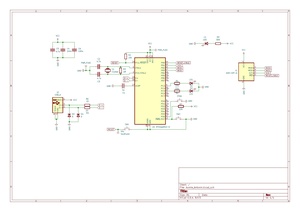
Carte électronique
Schématique
Routage
Réalisation
Programmation
Tests
Rendus
Archive GIT
Autres rendus

Projet KiCad programmateur AVR : Fichier:SE3-2024-G5-prog-kicad.zip