« SE3Binome2023-1 » : différence entre les versions
| Ligne 2 : | Ligne 2 : | ||
= Projet voiture Autonome = | = Projet voiture Autonome = | ||
=== Description === | === Description === | ||
| Ligne 16 : | Ligne 8 : | ||
- La voiture sera capable de suivre des instructions données par l'utilisateur via USB (Avancer à une vitesse maximale pendant 30 secondes, tourner à droite pendant 10 secondes, reculer lentement pendant 15 secondes, etc) | - La voiture sera capable de suivre des instructions données par l'utilisateur via USB (Avancer à une vitesse maximale pendant 30 secondes, tourner à droite pendant 10 secondes, reculer lentement pendant 15 secondes, etc) | ||
- Le second mode est en autonomie. La voiture avance et lorsqu'elle détecte un mur, puis | - Le second mode est en autonomie. La voiture avance et lorsqu'elle détecte un mur elle recule, puis tourne à droite jusqu'à ce qu'elle puisse avancer à nouveau. | ||
Ce projet mêle tous les domaines des systèmes embarqués de la programmation d'un microcontrôleur au brasage des composants en passant par la gestion de la batterie. | |||
= Conception du PCB = | = Conception du PCB = | ||
| Ligne 34 : | Ligne 28 : | ||
|- | |- | ||
|EMETTEUR | |EMETTEUR | ||
| | |PD4 | ||
|- | |- | ||
|LED2 | |LED2 | ||
| Ligne 46 : | Ligne 40 : | ||
|- | |- | ||
|LED5 | |LED5 | ||
| | |PB0 | ||
|- | |- | ||
| | |PWM1 | ||
|PB7 | |PB7 | ||
|- | |- | ||
| | |PWM2 | ||
|PD0 | |PD0 | ||
|- | |- | ||
|AIN1 | |AIN1 | ||
| | |PD2 | ||
|- | |- | ||
|AIN2 | |AIN2 | ||
| | |PD1 | ||
|- | |- | ||
|BIN1 | |BIN1 | ||
| Ligne 64 : | Ligne 58 : | ||
|- | |- | ||
|BIN2 | |BIN2 | ||
| | |PD5 | ||
|- | |- | ||
|MISO | |MISO | ||
| Ligne 78 : | Ligne 72 : | ||
|RESET | |RESET | ||
|} | |} | ||
= Réalisation du PCB / conception mécanique: = | = Réalisation du PCB / conception mécanique: = | ||
| Ligne 111 : | Ligne 87 : | ||
Ce choix mécaniques permet au véhicule de tourner sans sautiller. | Ce choix mécaniques permet au véhicule de tourner sans sautiller. | ||
De la conception 3D a aussi été utilisée afin de concevoir un support de batterie et un support pour le capteur IR. | De la conception 3D a aussi été utilisée afin de concevoir un support de batterie et un support pour le capteur IR pour éviter que les composants soient en l'air. | ||
== Gestion de l’énergie de la batterie == | == Gestion de l’énergie de la batterie == | ||
Pour gérer la charge de la batterie, nous utilisons le MAX1811ESA+. Ce composant permet de gérer la charge de batterie Lithium-ion. | Pour gérer la charge de la batterie, nous utilisons le MAX1811ESA+. Ce composant permet de gérer la charge de batterie 3,7V Lithium-ion. | ||
Pour recharger la batterie de la voiture, un autre port USB mini a été prévu uniquement pour cette tâche. | Pour recharger la batterie de la voiture, un autre port USB mini a été prévu uniquement pour cette tâche. | ||
| Ligne 124 : | Ligne 100 : | ||
=== PCB vide: === | === PCB vide: === | ||
[[Fichier:PCB_Vide.jpg|sans_cadre]] | [[Fichier:PCB_Vide.jpg|sans_cadre]] | ||
=== Brasage | === Brasage atmega16u4, driver moteur et USB sur le PCB: === | ||
[[Fichier:Brasage 21-05.jpg|sans_cadre|399x399px]] | [[Fichier:Brasage 21-05.jpg|sans_cadre|399x399px]] | ||
=== Montage moteur et roue libre: === | === Montage moteur et roue libre et correction de conception du PCB: === | ||
[[Fichier:Montage moteur et roue libre.jpg|sans_cadre]] | [[Fichier:Montage moteur et roue libre.jpg|sans_cadre]] | ||
== Conception mécanique == | == Conception mécanique == | ||
| Ligne 138 : | Ligne 112 : | ||
=== [[Fichier:Support de moteur.jpg|sans_cadre]] === | === [[Fichier:Support de moteur.jpg|sans_cadre]] === | ||
=== | === Roues: === | ||
[[Fichier:Roue.jpg|sans_cadre]] | [[Fichier:Roue.jpg|sans_cadre]] | ||
| Ligne 152 : | Ligne 126 : | ||
Afin d'éviter à notre robot de ne pouvoir avancer seulement en tout ou rien, le choix a été fait d'utiliser des signaux PWM. | Afin d'éviter à notre robot de ne pouvoir avancer seulement en tout ou rien, le choix a été fait d'utiliser des signaux PWM. | ||
Une Pulse Width Modulation ou Modulation de Largeur d'Impulsion est | Une Pulse Width Modulation ou Modulation de Largeur d'Impulsion est un signal dont le rapport cyclique varie. Dans notre cas, les signaux PWM nous permettent de modifier la valeur moyenne du signal afin que les moteurs tournent plus ou moins vite. | ||
Pour programmer un signal PWM sur un ATMEGA16u4 il faut : | Pour programmer un signal PWM sur un ATMEGA16u4 il faut : | ||
Version du 10 juin 2024 à 08:35

Projet voiture Autonome
Description
Réalisation d'une voiture avec deux modes de fonctionnements.
- La voiture sera capable de suivre des instructions données par l'utilisateur via USB (Avancer à une vitesse maximale pendant 30 secondes, tourner à droite pendant 10 secondes, reculer lentement pendant 15 secondes, etc)
- Le second mode est en autonomie. La voiture avance et lorsqu'elle détecte un mur elle recule, puis tourne à droite jusqu'à ce qu'elle puisse avancer à nouveau.
Ce projet mêle tous les domaines des systèmes embarqués de la programmation d'un microcontrôleur au brasage des composants en passant par la gestion de la batterie.
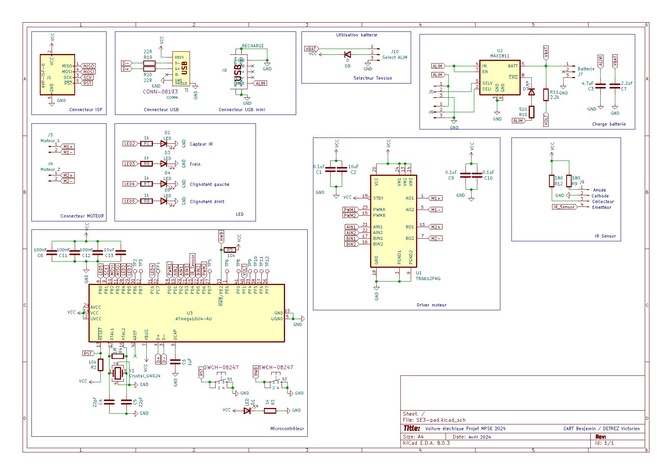
Conception du PCB
Schématique
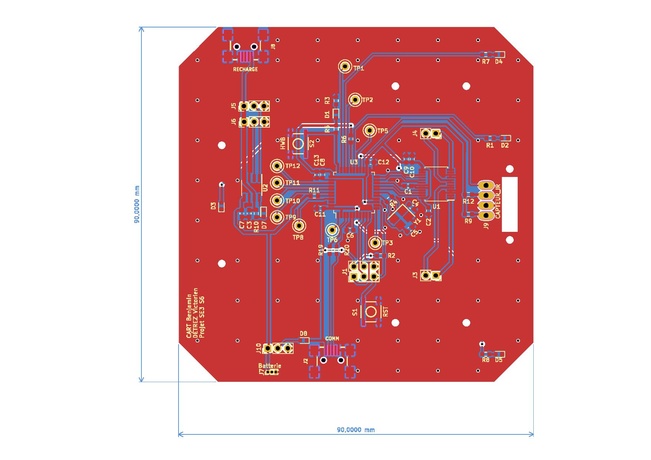
Routage
PINOUT
| NOM | PIN |
|---|---|
| EMETTEUR | PD4 |
| LED2 | PB4 |
| LED3 | PB5 |
| LED4 | PC6 |
| LED5 | PB0 |
| PWM1 | PB7 |
| PWM2 | PD0 |
| AIN1 | PD2 |
| AIN2 | PD1 |
| BIN1 | PD3 |
| BIN2 | PD5 |
| MISO | PB3 |
| MOSI | PB2 |
| SCK | PB1 |
| RST | RESET |
Réalisation du PCB / conception mécanique:
Concept
La voiture ne dispose pas de roue directrice. Le processus d'orientation du véhicule se fait donc via l'utilisation des moteurs dans le sens opposé pour faire tourner le véhicule.
Cependant, avec 4 roues ne possédant qu'un degrés de liberté le véhicule risque de sautiller pendant les phases d'orientation.
Il a donc été choisi de placer 3 roues sur le véhicule:
- 2 roues motrices.
- 1 roue libre.
Ce choix mécaniques permet au véhicule de tourner sans sautiller.
De la conception 3D a aussi été utilisée afin de concevoir un support de batterie et un support pour le capteur IR pour éviter que les composants soient en l'air.
Gestion de l’énergie de la batterie
Pour gérer la charge de la batterie, nous utilisons le MAX1811ESA+. Ce composant permet de gérer la charge de batterie 3,7V Lithium-ion.
Pour recharger la batterie de la voiture, un autre port USB mini a été prévu uniquement pour cette tâche.
Il faut faire attention à ne pas brancher les 2 connecteurs USB en même temps (même si une diode a été placée pour éviter les retours d'alimentations) et débrancher le cavalier situé près du connecteur de la batterie.
Brasage des composants sur le PCB
PCB vide:

Brasage atmega16u4, driver moteur et USB sur le PCB:

Montage moteur et roue libre et correction de conception du PCB:

Conception mécanique
Support de moteur:

Roues:

Support de batterie:


Support de capteur IR:


Programmation du µC
PWM
Afin d'éviter à notre robot de ne pouvoir avancer seulement en tout ou rien, le choix a été fait d'utiliser des signaux PWM.
Une Pulse Width Modulation ou Modulation de Largeur d'Impulsion est un signal dont le rapport cyclique varie. Dans notre cas, les signaux PWM nous permettent de modifier la valeur moyenne du signal afin que les moteurs tournent plus ou moins vite.
Pour programmer un signal PWM sur un ATMEGA16u4 il faut :
- définir les broches sur lesquelles les signaux sortiront :
Lors de la datasheet du µC, vous pouvons voir certaines broches du type OCnx (n : un chiffre, x: une lettre), c'est celles-ci que nous recherchons.
Le chiffre correspond au Timer et la lettre au comparateur.
Exemple avec OC0B il s'agit du Timer 0 et sa valeur de comparaison sera OCR0B.
- Configurer les registres :
Chaque Timer a ses spécificités mais nous pouvons remarquer des similitudes entre les différents Timers (il faut croire qu'ils y ont réfléchis).
Dans notre projet nous avons utilisé le Timer0 mais les autres font très bien l'affaire avec une particularité pour le Timer4.
- METTRE LES BROCHES OCnx EN SORTIE
Timer0
TCCR0A
- Les bits WGM00 et WGM01 permettent de choisir le mode du Timer0 (Table 13-6), pour nous ce sera le mode 3, Fast PWM avec WGM01 = 1 et WGM00 = 1 (et WGM02 = 0 situé dans le registre TCCR0B)
- les bits COM0x0 et COM0x1 servent à définir ce qu'il se passera lorsque le registre TCNT0 sera égal à OCR0n.
Si l'on regarde la table 13-2, nous pouvons voir les différentes configurations possibles. Dans notre cas, nous seront en COM0A1 = 1 et COM0A0 = 0 de sorte à ce que la tension moyenne soit en corrélation avec la valeur fixé de OCR0A.
TCCR0B
- WGM02 a le même rôle que les autres WGM0n dans le registre TCCR0A.
- CS00, CS01 et CS02 sont des pré diviseurs qui permettent d'avoir une fréquence précise, dans notre cas ce n'est pas nécessaire donc CS00 = 1 et les reste à 0.
- Nous n'utilisons pas d'interruption donc TIMSK0 n'est pas utilisé.
Timer4
Le Timer4 est très similaire au Timer0, mais il a ses particularités.
Son registre de compteur de coups d'horloge est sur 10 bits et donc 2 registres TCNT4 et TC4H , ce dernier stockant les 2 MSB.
Il possède aussi 4 registres de comparaison OCR4A, OCR4B, OCR4C et OCR4D cependant OCR4C est fixe et toujours placé à la valeur max possible du Timer4.
Enfin, il existe des sorties complémentées OC4x (barre). Mais attention elles ne fonctionnent pas exactement en inverse car il faut ajuster tnon-overlap / rising edge et tnon-overlap / falling edge grâce à DT4H et DT4L (registre DT4).
La configuration des registres se passe exactement de la même manière que pour le Timer0 (en adaptant le nom des registres bien sûr).
Seul élément important : Il faut activé le PWM avec le bit PWM4x dans le registre TCCR4A et/ou TCCR4C (15.12.1 / 15.12.2 de la datasheet).
Mode contrôle USB
Fonctions:
- Avancer, choix de la vitesse et de la durée.
- Freiner, arrêt du véhicule avec activation du feux stop.
- Reculer, choix de la vitesse et de la durée avec activation des feux de détresses.
- Tourner à droite, choix de la durée avec activation du clignotant droit.
- Tourner à gauche, choix de la durée avec activation du clignotant gauche.
Gestion du chargement du programme
Se renseigner sur comment faire
Tests
Vidéo de test en marche avant :
Vidéo de test en marche avant puis virage à gauche :
Vidéo 0 à 100 :
Liste des composants
- µC ATMega16U4 (contient un bootloader)
- 5 Leds de contrôle (Moteurs, alimentation, transmission, détecteur de ligne)
- driver moteur
- Batterie LiPo 3.7V
- Connecteurs Molex 3pin 1mm
Archive
GIT : https://archives.plil.fr/vdetrez/DETREZ_CART_programmation_des_systemes_embarques.git