SE4Binome2023-7
GIT
https://archives.plil.fr/lwijsman/PICO_lwijsman_apalifer
Ordonnanceur
Matériel

Le premier objectif était de réaliser la partie matériel de notre projet.
Un premier TP pratique nous a permis de réaliser différents composants qui allaient nous servir par la suite pour le bon fonctionnement de notre pico-ordinateur.
Nous avons ainsi pu réaliser les composants suivant :
- Réalisation des cables de liaison HE10 carte-mère/carte-fille avec des cables plats ruban 8 broches et des connecteurs HE10 femelles.
- Réalisation du shield : soudure du Lecteur SD, des LEDs et résistances, et des ports HE10 males
Également, nous ont été fourni les connecteurs pour l'afficheur 7 segments et la matrice de LEDS
Programmation de l'ordonnanceur
Première approche :
Pour l'ordonnanceur, nous avons commencé par réaliser la fonction d'interruption qui se déclenche toutes les 20ms. Ensuite, nous avons créé 2 processus distincts afin de tester le bon fonctionnement de notre ordonnanceur.
void scheduler() {
// Choisi la tâche suivante à exécuter en tournant en boucle
currentTask = (currentTask + 1) % NUM_TASKS;
}
Le processus 2 allume et éteint une LED toutes les 500ms, le processus 0 réalise la même opération sur une LED différente toutes les 1000ms, ces fonctions utilisent la fonction _delay_ms pour maintenir les LEDs allumés pendant un certain temps.
// Définition des tâches
void task0() {
// Code de la tâche 0
Output_setHigh(&PORTB, PB5);
while (1)
{
_delay_ms(1000);
Output_flip(&PORTB, PB5);
}
}
void task2() {
//Code de la tâche 2
Output_setHigh(&PORTD, PD7);
while (1)
{
_delay_ms(500);
Output_flip(&PORTD, PD7);
}
}
En implantant le programme sur la carte + shield, on constate que le programme fonctionne correctement, c'est-à-dire que chacune des deux LEDs clignotent à son rythme et les deux processus de gestion des LEDs fonctionnent simultanément.
Approche avancée :
Nous avons ensuite cherché à implémenter une fonction faisant office de pause, mais qui contrairement au delay, n'agissait pas comme une interruption à tout le programme. La fonction wait_ms permet de mettre une tâche en attente pendant un certain nombre de millisecondes.
void wait_ms(int ms){
cli();
taskList[currentTask].timer = ms;
taskList[currentTask].state = SLEEPING;
TCNT1 = 0;
sei();
TIMER1_COMPA_vect();
}
Le timer de la tâche prend la valeur en milliseconde spécifié dans l'argument de la fonction et la fonction passe en état de sommeil. Dans le programme, la fonction TCNT1 permet de mesurer le temps écoulé depuis l'appel à la fonction wait_ms, elle est donc ici fixée à 0. On fait ensuite directement appel à la routine d'interruption pour déclencher le mécanisme de gestion du temps.
La routine d'interruption du Timer1 est implémentée de telle sorte que le contexte de la tâche en cours est sauvegardé, l'ordonnanceur est appelé, puis le contexte de la prochaine tâche à exécuter est restauré.
ISR(TIMER1_COMPA_vect, ISR_NAKED)
{
// Sauvegarde du contexte de la tâche interrompue
portSAVE_CONTEXT();
// Sauvegarde la valeur actuelle du pointeur de pile (SP)
taskList[currentTask].stackPointer = SP;
// Appel à l'ordonnanceur
scheduler();
// Récupération du contexte de la tâche ré-activée
SP = taskList[currentTask].stackPointer;
// restaure les valeurs des registres depuis la pile.
portRESTORE_CONTEXT();
// return from interupt
asm volatile ( "reti" );
}
La fonction scheduler, commentée ci-dessous, permet de gérer l'ordonnancement des tâches en fonction de leur temps d'attente défini.
void scheduler() {
for(int i = 0; i < NUM_TASKS; i++){// Pour chaque tâche
if(taskList[i].state == SLEEPING){ // Si elle est en état SLEEPING
uint16_t time_elapsed = 20;
if(TCNT1 != 0){ // Le timer a commencé à compter
time_elapsed = TCNT1 * 200 / OCR1A / 10; // Temps en milliseconde écoulé depuis la dernière interruption
TCNT1 = 0; // Réinitialisation du timer pour la prochaine interruption
}
taskList[i].timer = taskList[i].timer - time_elapsed;
if(taskList[i].timer == 0) // Fin du timer
{
taskList[i].state = RUNNING; // La tâche se réveille
}
}
}
// Permet de sélectionner la tâche suivante à exécuter en tournant en boucle
do{
currentTask = (currentTask + 1) % NUM_TASKS;
}while(taskList[currentTask].state == SLEEPING);
}
Le programme complet et détaillé de notre ordonnanceur est disponible sur git.
Connexion SPI
Nous avons ensuite ajouté les fonctionnalités de communication sur le bus SPI.
Cela nous permet notamment de communiquer de l’ordonnanceur vers la matrice de LEDs afin d'y afficher quelque chose.
Comme sur l'exemple ci-dessous :
Le bus SPI est utilisé pour la communication série synchrone entre plusieurs périphériques. Nous avons donc premièrement implémenté une fonction d'initialisation qui configure le bus SPI, les broches définies comme entrées ou sorties, et la fréquence d'horloge.
void spi_init(void){
SPI_DDR |= (1<<SPI_MOSI)|(1<<SPI_SCK); // configuration sorties
SPI_DDR &= ~(1<<SPI_MISO); // configuration entrée
DDRD |= (1<<4);
PORTD |= (1<<4);
SPI_PORT |= (1<<SPI_SS);
SPCR = (1<<SPE)|(1<<MSTR)|(1<<SPR1); // Activation SPI (SPE) en état maître (MSTR)
// horloge F_CPU/64 (SPR1=1,SPR0=0)
}
Les fonctions d'activation/désactivation de la communication en série sont gérée par la mise à l'état haut ou bas de la ligne Slave Select.
void spi_activer(void){ // Activer la communication
PORTD &= ~(1<<4); // Ligne SS à l'état bas
}
void spi_desactiver(void){ // Désactiver la communication
PORTD |= (1<<4); // Ligne SS à l'état haut
}
La fonction principal qui permet l'échange de données sur le bus spi est la fonction spi_echange. La fonction spi_echange effectue le transfert d'octet sur le bus SPI en plaçant la valeur de l'octet dans le registre de données SPI (SPDR), puis en attendant la fin du transfert avant de renvoyer l'octet reçu.
uint8_t spi_echange(uint8_t envoi){ // Communication sur le bus SPI
SPDR = envoi; // octet a envoyer
while(!(SPSR & (1<<SPIF))); // Attente fin d'envoi
return SPDR; // octet reçu
}
Communication série : Matrice de LEDs
L'objectif de cette partie était d'établir et gérer une connexion série avec la carte Arduino, c'est-à-dire de pouvoir lire ou envoyer des données entre la carte et un terminal grâce à une interface en ligne de commande. Nous avons donc ici utiliser l'utilitaire minicom. Nous avons également implémenté des fonctions utilisant l'UART puisque la communication série est effectuée de manière asynchrone.
Configuration de l'UART :
L'UART (Universal Asynchronous Receiver/Transmitter) est un protocole de communication qui permet d'établir des liaisons série et permet la transmission de données série asynchrones, ce qui signifie que les données sont transmises sans utiliser une horloge commune entre l'émetteur et le récepteur.
La première fonction ci-dessous correspond donc à l'initialisation de l'UART :
void init_serie(int speed)
{
// Défini baud rate
UBRR0 = F_CPU / (((unsigned long int)speed) << 4) - 1;
UCSR0B = (1 << TXEN0 | 1 << RXEN0); // Active le module de transmission et réception
UCSR0C = (1 << UCSZ01 | 1 << UCSZ00); // Configure taille de données sur 8 bits
UCSR0A &= ~(1 << U2X0); // No double-speed
}
Pour communiquer avec l'UART, on implémente également les fonctions send_serie et get_serie.
void send_serie(char c)
{
sem_P(SERIAL_COM);
loop_until_bit_is_set(UCSR0A, UDRE0); // Boucle d'attente d'info du registre de contrôle pour envoi de donnée
UDR0 = c; // écrit un caractère dans le registre UDR0
sem_V(SERIAL_COM);
}
char get_serie()
{
sem_P(SERIAL_COM);
loop_until_bit_is_set(UCSR0A, RXC0);
sem_V(SERIAL_COM);
return UDR0; // renvoie le caractère reçu stocké dans le registre UDR0
}
Afin de synchroniser l'échange de données et éviter les problèmes de synchronisation sur la liaison série, nous utilisons des sémaphores (voir semaphore.c sur le dépôt git).
Démonstration de lecture sur le port série :
Comme il est possible de constater sur la vidéo ci-dessus, nous arrivons à lire depuis l'Arduino sur le port série. Ainsi, dès qu'un caractère est tapé au clavier, il est affiché sur la matrie de LEDs.
Démonstration d'écriture sur le port série :
Nous sommes également capable d'écrire depuis le port série, les données sont envoyés depuis l'Arduino et afficher sur l'utilitaire minicom.
Carte FPGA / VHDL
Par manque de temps, nous n'avons malheureusement pas pu réaliser cette partie.
Carte électronique numérique
L'objectif de cette partie était de concevoir et de créer un circuit imprimé (PCB) pour une carte écran LCD, englobant chaque étape du processus, depuis l'élaboration du schéma initial jusqu'à la programmation de l'affichage sur l'écran.
Ainsi cette partie abordera plus en détail les points suivants :
- Réalisation du PCB
- Schematic
- Routage
- Soudure
- Programmation de la carte électronique
- Code, explications et tests
Carte fille écran LCD
Référence écran : sparkfun ADM1602k-NSW-FBS
Partie 1 - réalisation du PCB :
Schematic :
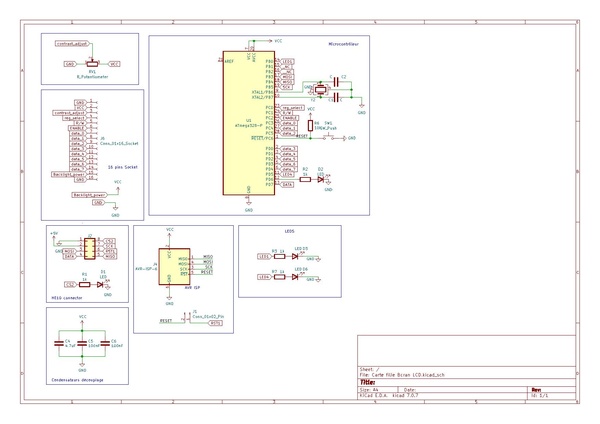
La première étape de notre projet consistait à la réalisation du schematic sous KiCad de notre carte écran. Afin de réaliser le schéma du routage et pour que l'écran soit correctement connecté nous nous sommes référés à la documentation de l'écran afin de relier chacune des broches du connecteur aux labels correspondants. Vous trouverez ci-contre le schematic et les composants de la carte.
Plus spécifiquement, cette carte possède :
- un microcontrôleur atmega328p
- un connecteur HE10 permettant de la relier à la carte mère
- un AVR ISP permettant la programmation de la carte
- des LEDs
- un connecteur 1x16 broches permettant la connexion avec l'écran
Une fois le schematic réalisé et après vérification, nous avons pu commencer à effectuer le routage de notre carte.
Après le point d'avancement, nous nous sommes aperçus que nous n'avions pas correctement effectué le pinout de l'Atmega328p certains ports n'étaient pas connectés aux endroits attendus. Nous avons donc su adapter notre carte afin qu'elle puisse être programmée.
Nous avons donc corrigé le schematic afin qu'il puisse illustrer correctement le fonctionnement de la carte.
Routage :
Pour le routage, nous avons également utilisé le logiciel KiCad. Vous trouverez ci-contre l'image correspondante à ce dernier.
Nous avons aussi du adapter notre routage pour qu'il corresponde avec notre carte une fois le circuit corrigé.

Soudures et tests :
Après réception de la carte PCB, nous avons réalisé la soudure des composants sur la carte. Nous avons ainsi pu tenter de programmer la carte avec l'Arduino en tant qu'ISP, mais nous obtenions une erreur. Également, après un test en programmant directement la carte avec un programme simple en C et un ficher Makefile adapté, nous en sommes arrivés à la conclusion que notre carte était défaillante.
Comme nous n'arrivions pas à programmer la carte, nous avons premièrement eu quelques doutes concernant la soudure du quartz, nous avons donc choisi de le remplacer mais cela n'a pas résolu le problème.
Comme nous l'avons évoqué précédemment, les connexions de l'AVR ISP était finalement en cause. Nous avons donc réussi à corriger le problème directement en câblant sur la carte. Nous avons donc implémenté un programme pour tester le clignotement d'une LED. La carte fonctionne.
| Partie supérieure | Partie inférieure |


Nous avons ensuite soudé le reste des composants (potentiomètre et connecteurs). L'un des pins du connecteur femelle (16 pins) sur la carte n'était pas correctement relié à la masse et nous empêché d'afficher sur l'écran. Erreur certainement causé au moment de la création du plan de masse, mais finalement corrigée en soudant un fil sur le dessous de la carte de la même manière que précédemment.
Ainsi, nous avons pu tester le programme "blink" fourni dans l'Arduino IDE et constater que notre carte fonctionne.
Partie 2 - Programmation de la carte électronique :
Code et explications
Bilan du projet
Ce TP / Projet nous a permis d'aborder de nombreux point intéressants et d'en découvrir davantage sur plusieurs aspects majeurs comme la communication série ou encore les composants systèmes, avec l'ordonnanceur notamment.
La première partie que nous avons abordée était la réalisation de la carte PCB pour notre futur carte électronique. Nous avions d'ores et déjà abordé ce sujet l'année dernière, néanmoins, nous avons eu certaines difficultés lors de la conception de notre PCB. Ces difficultés nous ont coûté en termes de temps, mais nous avons su rebondir et faire les adaptations nécessaires pour obtenir une carte fonctionnelle et avancer sur la suite du projet.
Nous avons consacré la majeur partie de notre temps à établir un ordonnanceur fonctionnel et opérationnel pour les différentes tâches suivant sa réalisation. Ce fut assez complexe mais réellement instructif. Nous avons pu également, réaliser la programmation de la carte écran afin de pouvoir interagir avec l'écran et afficher des caractères sur ce dernier.
Malgré une première partie de projet compliquée, nous avons su nous investir davantage et redoubler d'efforts afin de pouvoir remplir nos objectifs. Ainsi, nous avons réussi à proposer une carte écran fonctionnelle, mais aussi un ordonnanceur et des fonctionnalités permettant une communication série entre notre machine et l'Arduino. Ceci, afin d'afficher des caractères sur une matrice de LEDs depuis un utilitaire minicom ou sur le terminal depuis l'Arduino.